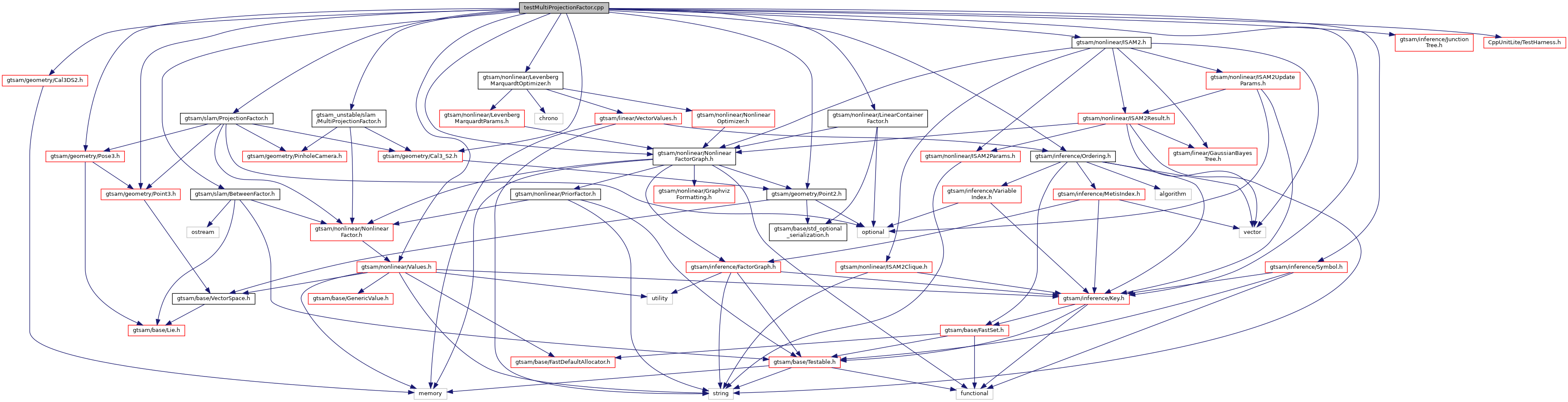
#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/ProjectionFactor.h>#include <gtsam_unstable/slam/MultiProjectionFactor.h>#include <gtsam/nonlinear/ISAM2.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/LinearContainerFactor.h>#include <gtsam/inference/Ordering.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/inference/Symbol.h>#include <gtsam/inference/Key.h>#include <gtsam/inference/JunctionTree.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Cal3DS2.h>#include <gtsam/geometry/Cal3_S2.h>#include <CppUnitLite/TestHarness.h>
Include dependency graph for testMultiProjectionFactor.cpp:
Go to the source code of this file.
Functions | |
| static Cal3_S2::shared_ptr | K (new Cal3_S2(fov, w, h)) |
| int | main () |
| static SharedNoiseModel | model (noiseModel::Unit::Create(2)) |
| TEST (MultiProjectionFactor, create) | |
Variables | |
| static double | fov = 60 |
| static int | h =480 |
| static int | w =640 |
Function Documentation
◆ K()
|
static |
◆ main()
| int main | ( | ) |
- ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */* ************************************************************************* */
Definition at line 228 of file testMultiProjectionFactor.cpp.
◆ model()
|
static |
◆ TEST()
| TEST | ( | MultiProjectionFactor | , |
| create | |||
| ) |
- ************************************************************************* */
Definition at line 58 of file testMultiProjectionFactor.cpp.
Variable Documentation
◆ fov
|
static |
Definition at line 43 of file testMultiProjectionFactor.cpp.
◆ h
|
static |
Definition at line 44 of file testMultiProjectionFactor.cpp.
◆ w
|
static |
Definition at line 44 of file testMultiProjectionFactor.cpp.