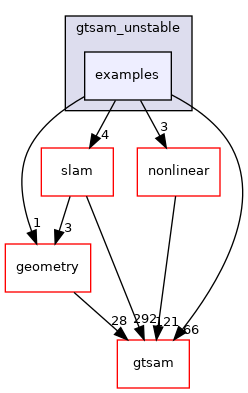
Directory dependency graph for examples:
Files | |
| file | ConcurrentCalibration.cpp [code] |
| First step towards estimating monocular calibration in concurrent filter/smoother framework. To start with, just batch LM. | |
| file | ConcurrentFilteringAndSmoothingExample.cpp [code] |
| Demonstration of the concurrent filtering and smoothing architecture using a planar robot example and multiple odometry-like sensors. | |
| file | GncPoseAveragingExample.cpp [code] |
| example of GNC estimating a single pose from pose priors possibly corrupted with outliers You can run this example using: ./GncPoseAveragingExample nrInliers nrOutliers e.g.,: ./GncPoseAveragingExample 10 5 (if the numbers are not specified, default values nrInliers = 10 and nrOutliers = 10 are used) | |
| file | ISAM2_SmartFactorStereo_IMU.cpp [code] |
| test of iSAM2 with smart stereo factors and IMU preintegration, originally used to debug valgrind invalid reads with Eigen | |
| file | SmartProjectionFactorExample.cpp [code] |
| A stereo visual odometry example. | |
| file | SmartRangeExample_plaza1.cpp [code] |
| A 2D Range SLAM example. | |
| file | SmartRangeExample_plaza2.cpp [code] |
| A 2D Range SLAM example. | |
| file | SmartStereoProjectionFactorExample.cpp [code] |
| file | TimeOfArrivalExample.cpp [code] |
| Track a moving object "Time of Arrival" measurements at 4 microphones. | |