|
| const Vector3 & | accel () const |
| |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| |
| bool | equals (const NonlinearFactor &e, double tol=1e-9) const override |
| |
| virtual Vector | evaluateError (const Pose3 &x1, const Pose3 &x2, OptionalMatrixType H1, OptionalMatrixType H2) const |
| |
| Vector | evaluateError (const PoseRTV &x1, const PoseRTV &x2, OptionalMatrixType H1, OptionalMatrixType H2) const override |
| |
| const Vector3 & | gyro () const |
| |
| | IMUFactor (const Vector3 &accel, const Vector3 &gyro, double dt, const Key &key1, const Key &key2, const SharedNoiseModel &model) |
| |
| | IMUFactor (const Vector6 &imu_vector, double dt, const Key &key1, const Key &key2, const SharedNoiseModel &model) |
| |
| void | print (const std::string &s="", const gtsam::KeyFormatter &formatter=gtsam::DefaultKeyFormatter) const override |
| |
| Vector6 | z () const |
| |
| | ~IMUFactor () override |
| |
| Key | key () const |
| |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const =0 |
| |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| |
| | ~NoiseModelFactorN () override |
| |
| | NoiseModelFactorN () |
| | Default Constructor for I/O. More...
|
| |
| | NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) |
| |
| | NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) |
| |
| Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrixTypeT< ValueTypes >... H) const=0 |
| |
| Vector | evaluateError (const ValueTypes &... x, MatrixTypeT< ValueTypes > &... H) const |
| |
| Vector | evaluateError (const ValueTypes &... x) const |
| |
| AreAllMatrixRefs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| |
| AreAllMatrixPtrs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| |
| Key | key1 () const |
| |
| Key | key2 () const |
| |
| Key | key3 () const |
| |
| Key | key4 () const |
| |
| Key | key5 () const |
| |
| Key | key6 () const |
| |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| |
| size_t | dim () const override |
| |
| double | error (const Values &c) const override |
| |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| |
| const SharedNoiseModel & | noiseModel () const |
| | access to the noise model More...
|
| |
| | NoiseModelFactor () |
| |
| template<typename CONTAINER > |
| | NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) |
| |
| Vector | unweightedWhitenedError (const Values &c) const |
| |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| |
| double | weight (const Values &c) const |
| |
| Vector | whitenedError (const Values &c) const |
| |
| | ~NoiseModelFactor () override |
| |
| | NonlinearFactor () |
| |
| template<typename CONTAINER > |
| | NonlinearFactor (const CONTAINER &keys) |
| |
| double | error (const HybridValues &c) const override |
| |
| virtual bool | active (const Values &) const |
| |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| |
| virtual bool | sendable () const |
| |
| virtual | ~Factor ()=default |
| | Default destructor. More...
|
| |
| bool | empty () const |
| | Whether the factor is empty (involves zero variables). More...
|
| |
| Key | front () const |
| | First key. More...
|
| |
| Key | back () const |
| | Last key. More...
|
| |
| const_iterator | find (Key key) const |
| | find More...
|
| |
| const KeyVector & | keys () const |
| | Access the factor's involved variable keys. More...
|
| |
| const_iterator | begin () const |
| |
| const_iterator | end () const |
| |
| size_t | size () const |
| |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print only keys More...
|
| |
| bool | equals (const This &other, double tol=1e-9) const |
| | check equality More...
|
| |
| KeyVector & | keys () |
| |
| iterator | begin () |
| |
| iterator | end () |
| |
|
| using | Base = NoiseModelFactor |
| |
| using | KeyType = Key |
| |
| using | MatrixTypeT = Matrix |
| |
| using | OptionalMatrixTypeT = Matrix * |
| |
| using | This = NoiseModelFactorN< ValueTypes... > |
| |
| using | IsConvertible = typename std::enable_if< std::is_convertible< From, To >::value, void >::type |
| |
| using | IndexIsValid = typename std::enable_if<(I >=1) &&(I<=N), void >::type |
| |
| using | ContainerElementType = typename std::decay< decltype(*std::declval< Container >().begin())>::type |
| |
| using | IsContainerOfKeys = IsConvertible< ContainerElementType< Container >, Key > |
| |
| using | AreAllMatrixRefs = std::enable_if_t<(... &&std::is_convertible< Args, Matrix & >::value), Ret > |
| |
| using | IsMatrixPointer = std::is_same< typename std::decay_t< Arg >, Matrix * > |
| |
| using | IsNullpointer = std::is_same< typename std::decay_t< Arg >, std::nullptr_t > |
| |
| using | AreAllMatrixPtrs = std::enable_if_t<(... &&(IsMatrixPointer< Args >::value||IsNullpointer< Args >::value)), Ret > |
| |
| typedef NonlinearFactor | Base |
| |
| typedef NoiseModelFactor | This |
| |
| typedef Factor | Base |
| |
| typedef NonlinearFactor | This |
| |
| | NoiseModelFactor (const SharedNoiseModel &noiseModel) |
| |
| | Factor () |
| |
| template<typename CONTAINER > |
| | Factor (const CONTAINER &keys) |
| |
| template<typename ITERATOR > |
| | Factor (ITERATOR first, ITERATOR last) |
| |
| template<typename CONTAINER > |
| static Factor | FromKeys (const CONTAINER &keys) |
| |
| template<typename ITERATOR > |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| |
template<class POSE>
class gtsam::IMUFactor< POSE >
Class that represents integrating IMU measurements over time for dynamic systems Templated to allow for different key types, but variables all assumed to be PoseRTV
Definition at line 21 of file IMUFactor.h.
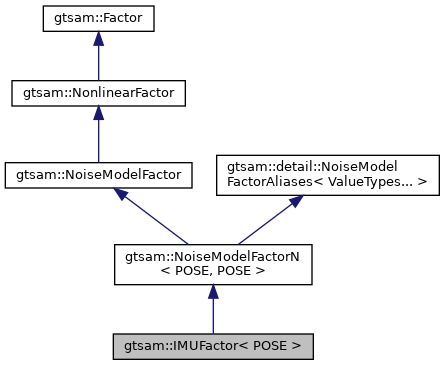
 Public Types inherited from gtsam::NoiseModelFactorN< POSE, POSE >
Public Types inherited from gtsam::NoiseModelFactorN< POSE, POSE >