#include "ros/node.h"#include "std_msgs/String.h"#include "topic_tools/DemuxSelect.h"#include "topic_tools/shape_shifter.h"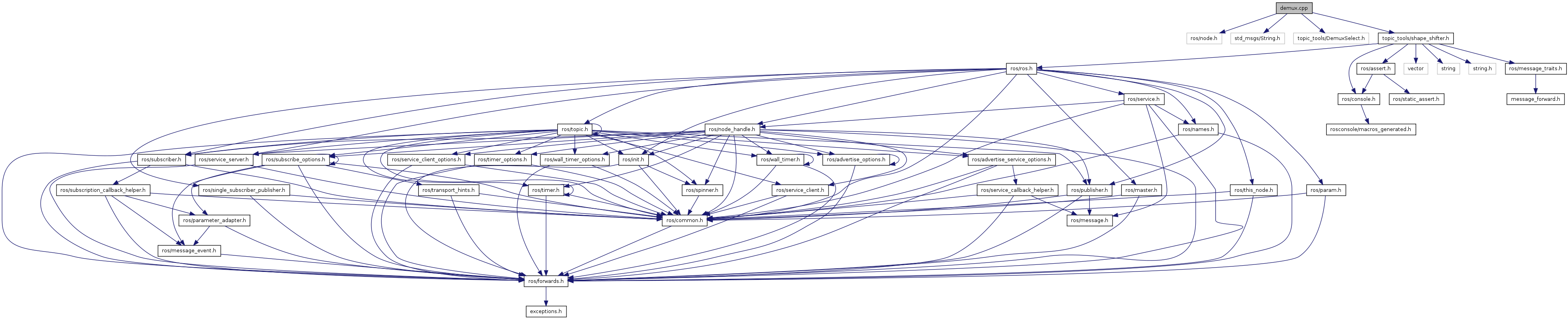
Go to the source code of this file.
Functions | |
| void | in_cb () |
| int | main (int argc, char **argv) |
| bool | sel_srv_cb (topic_tools::DemuxSelect::Request &req, topic_tools::DemuxSelect::Response &res) |
Variables | |
| static bool | g_advertised = false |
| static ShapeShifter | g_in_msg |
| static ros::Node * | g_node = NULL |
| static vector< string > | g_output_topics |
| static std_msgs::String | g_sel_msg |
| static vector< string > | g_selected |
| bool sel_srv_cb | ( | topic_tools::DemuxSelect::Request & | req, | |
| topic_tools::DemuxSelect::Response & | res | |||
| ) |
bool g_advertised = false [static] |
ShapeShifter g_in_msg [static] |
vector<string> g_output_topics [static] |
vector<string> g_selected [static] |

