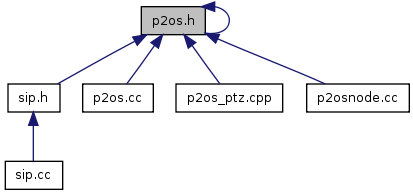
p2os.h File Reference
#include <pthread.h>
#include <sys/time.h>
#include <iostream>
#include <string.h>
#include "packet.h"
#include "ros/ros.h"
#include <string>
#include "nav_msgs/Odometry.h"
#include "geometry_msgs/Twist.h"
#include <tf/transform_broadcaster.h>
#include <p2os_driver/BatteryState.h>
#include <p2os_driver/MotorState.h>
#include <p2os_driver/GripperState.h>
#include <p2os_driver/SonarArray.h>
#include <p2os_driver/DIO.h>
#include <p2os_driver/AIO.h>
#include <diagnostic_updater/publisher.h>
#include <diagnostic_updater/diagnostic_updater.h>
#include <limits.h>
#include <stdint.h>
#include <stdio.h>
#include <p2os_driver/PTZState.h>
#include "packet.h"
#include "robot_params.h"
Go to the source code of this file.
Typedef Documentation