#include <gtest/gtest.h>#include <sys/time.h>#include "laser_geometry/laser_geometry.h"#include "sensor_msgs/PointCloud.h"#include <math.h>#include "angles/angles.h"#include "rostest/permuter.h"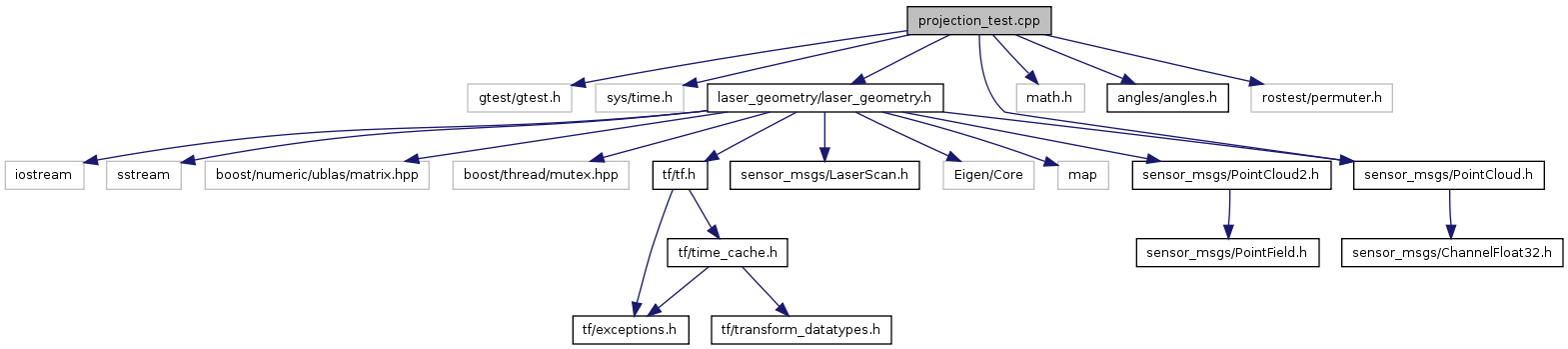
Go to the source code of this file.
Classes | |
| class | BuildScanException |
| class | TestProjection |
Defines | |
| #define | PROJECTION_TEST_RANGE_MAX (40.0) |
| #define | PROJECTION_TEST_RANGE_MIN (0.23) |
Functions | |
| sensor_msgs::LaserScan | build_constant_scan (double range, double intensity, double ang_min, double ang_max, double ang_increment, ros::Duration scan_time) |
| int | main (int argc, char **argv) |
| TEST (laser_geometry, transformLaserScanToPointCloud2) | |
| TEST (laser_geometry, transformLaserScanToPointCloud) | |
| TEST (laser_geometry, projectLaser2) | |
| void | test_getUnitVectors (double angle_min, double angle_max, double angle_increment, unsigned int length) |
| #define PROJECTION_TEST_RANGE_MAX (40.0) |
Definition at line 43 of file projection_test.cpp.
| #define PROJECTION_TEST_RANGE_MIN (0.23) |
Definition at line 42 of file projection_test.cpp.
| sensor_msgs::LaserScan build_constant_scan | ( | double | range, | |
| double | intensity, | |||
| double | ang_min, | |||
| double | ang_max, | |||
| double | ang_increment, | |||
| ros::Duration | scan_time | |||
| ) |
Definition at line 48 of file projection_test.cpp.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 680 of file projection_test.cpp.
| TEST | ( | laser_geometry | , | |
| transformLaserScanToPointCloud2 | ||||
| ) |
Definition at line 539 of file projection_test.cpp.
| TEST | ( | laser_geometry | , | |
| transformLaserScanToPointCloud | ||||
| ) |
Definition at line 422 of file projection_test.cpp.
| TEST | ( | laser_geometry | , | |
| projectLaser2 | ||||
| ) |
Definition at line 290 of file projection_test.cpp.
| void test_getUnitVectors | ( | double | angle_min, | |
| double | angle_max, | |||
| double | angle_increment, | |||
| unsigned int | length | |||
| ) |
Definition at line 89 of file projection_test.cpp.

