Header file for Clik class definitions. More...
#include "robot.h"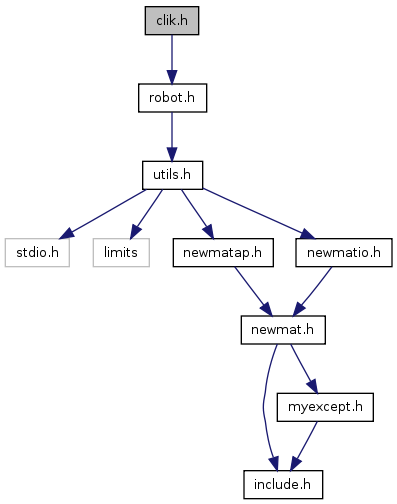
Go to the source code of this file.
Classes | |
| class | Clik |
| Handle Closed Loop Inverse Kinematics scheme. More... | |
Defines | |
| #define | CLICK_DH 1 |
| Using Clik under DH notation. | |
| #define | CLICK_mDH 2 |
| Using Clik under modified DH notation. | |
| #define | CLICK_mDH_min_para 3 |
| Using Clik under modified DH notation with minimum intertial parameters. | |
Variables | |
| static const char | header_clik_rcsid [] = "$Id: clik.h,v 1.6 2006/05/16 16:11:15 gourdeau Exp $" |
| RCS/CVS version. | |
Header file for Clik class definitions.
Definition in file clik.h.
| #define CLICK_mDH_min_para 3 |
const char header_clik_rcsid[] = "$Id: clik.h,v 1.6 2006/05/16 16:11:15 gourdeau Exp $" [static] |

