#include "constraint_aware_spline_smoother/DynamicPath.h"#include <list>#include <algorithm>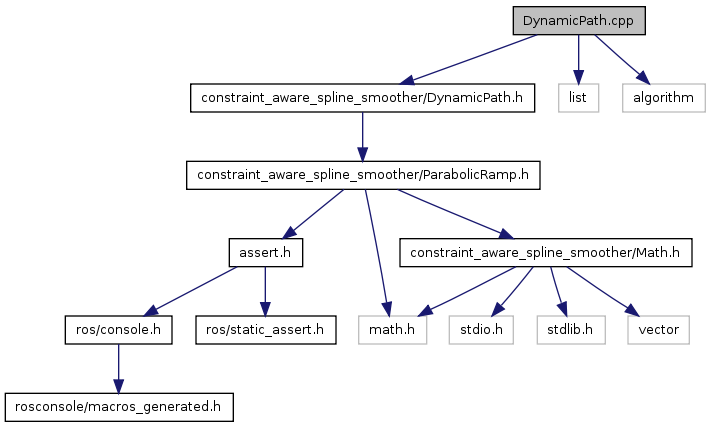
Go to the source code of this file.
Classes | |
| struct | RampSection |
Functions | |
| void | BoundingBox (const ParabolicRampND &ramp, Real ta, Real tb, Vector &bmin, Vector &bmax) |
| void | BoundingBox (const ParabolicRamp1D &ramp, Real ta, Real tb, Real &bmin, Real &bmax) |
| bool | CheckRamp (const ParabolicRampND &ramp, FeasibilityCheckerBase *space, Real tol) |
| bool | CheckRamp (const ParabolicRampND &ramp, FeasibilityCheckerBase *feas, DistanceCheckerBase *distance, int maxiters) |
| Real | LInfDistance (const Vector &a, const Vector &b) |
| Real | MaxBBLInfDistance (const Vector &x, const Vector &bmin, const Vector &bmax) |
Variables | |
| static const int | checkMaxIters = 1000 |
| static const Real | EpsilonT = 1e-8 |
| void BoundingBox | ( | const ParabolicRampND & | ramp, | |
| Real | ta, | |||
| Real | tb, | |||
| Vector & | bmin, | |||
| Vector & | bmax | |||
| ) |
Definition at line 265 of file DynamicPath.cpp.
| void BoundingBox | ( | const ParabolicRamp1D & | ramp, | |
| Real | ta, | |||
| Real | tb, | |||
| Real & | bmin, | |||
| Real & | bmax | |||
| ) |
Definition at line 222 of file DynamicPath.cpp.
| bool CheckRamp | ( | const ParabolicRampND & | ramp, | |
| FeasibilityCheckerBase * | space, | |||
| Real | tol | |||
| ) |
Definition at line 332 of file DynamicPath.cpp.
| bool CheckRamp | ( | const ParabolicRampND & | ramp, | |
| FeasibilityCheckerBase * | feas, | |||
| DistanceCheckerBase * | distance, | |||
| int | maxiters | |||
| ) |
Definition at line 276 of file DynamicPath.cpp.
Definition at line 41 of file DynamicPath.cpp.
Definition at line 51 of file DynamicPath.cpp.
const int checkMaxIters = 1000 [static] |
Definition at line 39 of file DynamicPath.cpp.
Definition at line 37 of file DynamicPath.cpp.

