#include "kalman.h"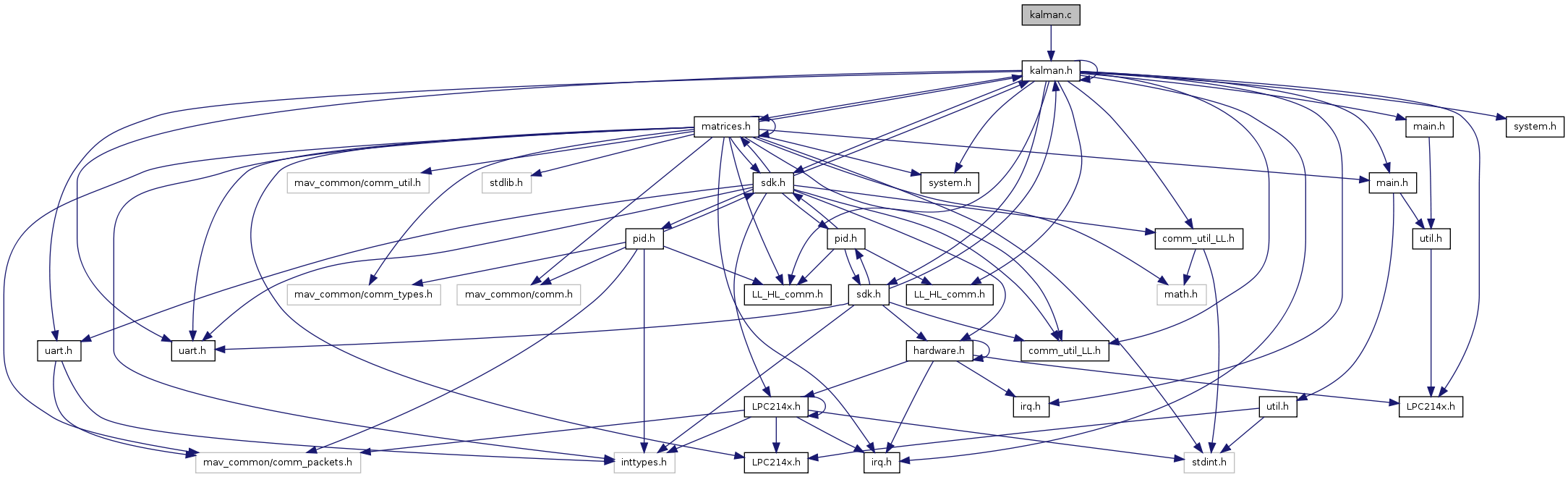
Go to the source code of this file.
Functions | |
| void | CorrectPos (KalPos *k) |
| void | CorrectYaw (KalYaw *k) |
| void | InitKalPos (KalPos *k) |
| void | InitKalYaw (KalYaw *k) |
| void | KFilter (void) |
| void | PredictPos (KalPos *k, float dt) |
| void | PredictYaw (KalYaw *k, float dt) |
| void | resetKalmanFilter () |
Variables | |
| float | g_accel_x |
| float | g_accel_y |
| float | g_accel_z |
| float | g_cos_psi |
| MAV_CTRL_DEBUG_PKT | g_ctrl_debug_pkt |
| float | g_imu_gravity |
| MAV_IMU_PKT | g_imu_pkt |
| uint8_t | g_kf_x_enabled |
| uint8_t | g_kf_y_enabled |
| uint8_t | g_kf_yaw_enabled |
| uint8_t | g_kf_z_enabled |
| volatile int64_t | g_last_height_pkt_time = 0 |
| MAV_HEIGHT_PKT | g_mav_height_pkt |
| PacketInfo * | g_mav_height_pkt_info |
| MAV_KF_CFG_PKT | g_mav_kf_cfg_pkt |
| MAV_POSE2D_PKT | g_mav_pose2D_pkt |
| PacketInfo * | g_mav_pose2D_pkt_info |
| unsigned int | g_sdk_loops |
| float | g_sin_psi |
| float | g_vz_p_f = 0 |
| MAV_CTRL_DEBUG_PKT g_ctrl_debug_pkt |
| float g_imu_gravity |
| uint8_t g_kf_x_enabled |
| uint8_t g_kf_y_enabled |
| uint8_t g_kf_yaw_enabled |
| uint8_t g_kf_z_enabled |
| volatile int64_t g_last_height_pkt_time = 0 |
| MAV_HEIGHT_PKT g_mav_height_pkt |
| MAV_KF_CFG_PKT g_mav_kf_cfg_pkt |
| MAV_POSE2D_PKT g_mav_pose2D_pkt |
| unsigned int g_sdk_loops |

