ProjectInliers uses a model and a set of inlier indices from a PointCloud to project them into a separate PointCloud. More...
#include <project_inliers.h>
Public Member Functions | |
| bool | getCopyAllData () |
| Get whether all data is being copied (true), or only the projected inliers (false). | |
| bool | getCopyAllFields () |
| Get whether all fields are being copied (true), or only XYZ (false). | |
| ModelCoefficientsConstPtr | getModelCoefficients () |
| Get a pointer to the model coefficients. | |
| int | getModelType () |
| Get the type of SAC model used. | |
| ProjectInliers () | |
| Empty constructor. | |
| void | setCopyAllData (bool val) |
| Set whether all data will be returned, or only the projected inliers. | |
| void | setCopyAllFields (bool val) |
| Set whether all fields should be copied, or only the XYZ. | |
| void | setModelCoefficients (const ModelCoefficientsConstPtr &model) |
| Provide a pointer to the model coefficients. | |
| void | setModelType (int model) |
| The type of model to use (user given parameter). | |
Protected Member Functions | |
| void | applyFilter (PointCloud2 &output) |
| Abstract filter method. | |
Protected Attributes | |
| bool | copy_all_data_ |
| True if all data will be returned, false if only the projected inliers. Default: false. | |
| bool | copy_all_fields_ |
| True if all fields will be returned, false if only XYZ. Default: true. | |
| ModelCoefficientsConstPtr | model_ |
| A pointer to the vector of model coefficients. | |
| int | model_type_ |
| The type of model to use (user given parameter). | |
Private Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud2::ConstPtr | PointCloud2ConstPtr |
| typedef PointCloud2::Ptr | PointCloud2Ptr |
| typedef SampleConsensusModel < PointXYZ >::Ptr | SampleConsensusModelPtr |
Private Member Functions | |
| virtual bool | initSACModel (int model_type) |
Private Attributes | |
| SampleConsensusModelPtr | sacmodel_ |
| The model that needs to be segmented. | |
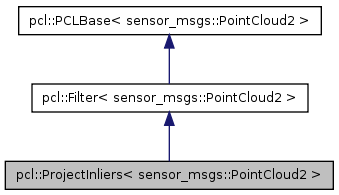
ProjectInliers uses a model and a set of inlier indices from a PointCloud to project them into a separate PointCloud.
Definition at line 151 of file project_inliers.h.
typedef sensor_msgs::PointCloud2 pcl::ProjectInliers< sensor_msgs::PointCloud2 >::PointCloud2 [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 156 of file project_inliers.h.
typedef PointCloud2::ConstPtr pcl::ProjectInliers< sensor_msgs::PointCloud2 >::PointCloud2ConstPtr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 158 of file project_inliers.h.
typedef PointCloud2::Ptr pcl::ProjectInliers< sensor_msgs::PointCloud2 >::PointCloud2Ptr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 157 of file project_inliers.h.
typedef SampleConsensusModel<PointXYZ>::Ptr pcl::ProjectInliers< sensor_msgs::PointCloud2 >::SampleConsensusModelPtr [private] |
Definition at line 160 of file project_inliers.h.
| pcl::ProjectInliers< sensor_msgs::PointCloud2 >::ProjectInliers | ( | ) | [inline] |
Empty constructor.
Definition at line 165 of file project_inliers.h.
| void pcl::ProjectInliers< sensor_msgs::PointCloud2 >::applyFilter | ( | PointCloud2 & | output | ) | [protected, virtual] |
Abstract filter method.
The implementation needs to set output.{data, row_step, point_step, width, height, is_dense}.
Implements pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 45 of file project_inliers.cpp.
| bool pcl::ProjectInliers< sensor_msgs::PointCloud2 >::getCopyAllData | ( | ) | [inline] |
Get whether all data is being copied (true), or only the projected inliers (false).
Definition at line 202 of file project_inliers.h.
| bool pcl::ProjectInliers< sensor_msgs::PointCloud2 >::getCopyAllFields | ( | ) | [inline] |
Get whether all fields are being copied (true), or only XYZ (false).
Definition at line 195 of file project_inliers.h.
| ModelCoefficientsConstPtr pcl::ProjectInliers< sensor_msgs::PointCloud2 >::getModelCoefficients | ( | ) | [inline] |
Get a pointer to the model coefficients.
Definition at line 188 of file project_inliers.h.
| int pcl::ProjectInliers< sensor_msgs::PointCloud2 >::getModelType | ( | ) | [inline] |
Get the type of SAC model used.
Definition at line 178 of file project_inliers.h.
| bool pcl::ProjectInliers< sensor_msgs::PointCloud2 >::initSACModel | ( | int | model_type | ) | [private, virtual] |
Definition at line 135 of file project_inliers.cpp.
| void pcl::ProjectInliers< sensor_msgs::PointCloud2 >::setCopyAllData | ( | bool | val | ) | [inline] |
Set whether all data will be returned, or only the projected inliers.
| val | true if all data should be returned, false if only the projected inliers |
Definition at line 200 of file project_inliers.h.
| void pcl::ProjectInliers< sensor_msgs::PointCloud2 >::setCopyAllFields | ( | bool | val | ) | [inline] |
Set whether all fields should be copied, or only the XYZ.
| val | true if all fields will be returned, false if only XYZ |
Definition at line 193 of file project_inliers.h.
| void pcl::ProjectInliers< sensor_msgs::PointCloud2 >::setModelCoefficients | ( | const ModelCoefficientsConstPtr & | model | ) | [inline] |
Provide a pointer to the model coefficients.
| model | a pointer to the model coefficients |
Definition at line 184 of file project_inliers.h.
| void pcl::ProjectInliers< sensor_msgs::PointCloud2 >::setModelType | ( | int | model | ) | [inline] |
The type of model to use (user given parameter).
| model | the model type (check model_types.h) |
Definition at line 174 of file project_inliers.h.
bool pcl::ProjectInliers< sensor_msgs::PointCloud2 >::copy_all_data_ [protected] |
True if all data will be returned, false if only the projected inliers. Default: false.
Definition at line 208 of file project_inliers.h.
bool pcl::ProjectInliers< sensor_msgs::PointCloud2 >::copy_all_fields_ [protected] |
True if all fields will be returned, false if only XYZ. Default: true.
Definition at line 211 of file project_inliers.h.
ModelCoefficientsConstPtr pcl::ProjectInliers< sensor_msgs::PointCloud2 >::model_ [protected] |
A pointer to the vector of model coefficients.
Definition at line 214 of file project_inliers.h.
int pcl::ProjectInliers< sensor_msgs::PointCloud2 >::model_type_ [protected] |
The type of model to use (user given parameter).
Definition at line 205 of file project_inliers.h.
The model that needs to be segmented.
Definition at line 220 of file project_inliers.h.

