#include <btDefaultCollisionConfiguration.h>
btCollisionConfiguration allows to configure Bullet collision detection stack allocator, pool memory allocators
Definition at line 52 of file btDefaultCollisionConfiguration.h.
| btDefaultCollisionConfiguration::btDefaultCollisionConfiguration | ( | const btDefaultCollisionConstructionInfo & | constructionInfo = btDefaultCollisionConstructionInfo() |
) |
| virtual btDefaultCollisionConfiguration::~btDefaultCollisionConfiguration | ( | ) | [virtual] |
| virtual btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::getCollisionAlgorithmCreateFunc | ( | int | proxyType0, | |
| int | proxyType1 | |||
| ) | [virtual] |
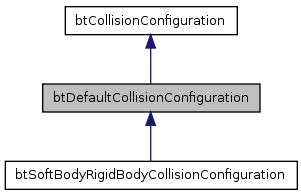
Implements btCollisionConfiguration.
Reimplemented in btSoftBodyRigidBodyCollisionConfiguration.
| virtual btPoolAllocator* btDefaultCollisionConfiguration::getCollisionAlgorithmPool | ( | ) | [inline, virtual] |
Implements btCollisionConfiguration.
Definition at line 105 of file btDefaultCollisionConfiguration.h.
| virtual btPoolAllocator* btDefaultCollisionConfiguration::getPersistentManifoldPool | ( | ) | [inline, virtual] |
memory pools
Implements btCollisionConfiguration.
Definition at line 100 of file btDefaultCollisionConfiguration.h.
| virtual btVoronoiSimplexSolver* btDefaultCollisionConfiguration::getSimplexSolver | ( | ) | [inline, virtual] |
Definition at line 115 of file btDefaultCollisionConfiguration.h.
| virtual btStackAlloc* btDefaultCollisionConfiguration::getStackAllocator | ( | ) | [inline, virtual] |
Implements btCollisionConfiguration.
Definition at line 110 of file btDefaultCollisionConfiguration.h.
| void btDefaultCollisionConfiguration::setConvexConvexMultipointIterations | ( | int | numPerturbationIterations = 3, |
|
| int | minimumPointsPerturbationThreshold = 3 | |||
| ) |
Use this method to allow to generate multiple contact points between at once, between two objects using the generic convex-convex algorithm. By default, this feature is disabled for best performance.
| numPerturbationIterations | controls the number of collision queries. Set it to zero to disable the feature. | |
| minimumPointsPerturbationThreshold | is the minimum number of points in the contact cache, above which the feature is disabled 3 is a good value for both params, if you want to enable the feature. This is because the default contact cache contains a maximum of 4 points, and one collision query at the unperturbed orientation is performed first. See Bullet/Demos/CollisionDemo for an example how this feature gathers multiple points. |
Definition at line 86 of file btDefaultCollisionConfiguration.h.
Definition at line 66 of file btDefaultCollisionConfiguration.h.
Definition at line 77 of file btDefaultCollisionConfiguration.h.
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_convexConcaveCreateFunc [protected] |
Definition at line 75 of file btDefaultCollisionConfiguration.h.
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_convexConvexCreateFunc [protected] |
Definition at line 74 of file btDefaultCollisionConfiguration.h.
Definition at line 90 of file btDefaultCollisionConfiguration.h.
Definition at line 79 of file btDefaultCollisionConfiguration.h.
bool btDefaultCollisionConfiguration::m_ownsCollisionAlgorithmPool [protected] |
Definition at line 67 of file btDefaultCollisionConfiguration.h.
bool btDefaultCollisionConfiguration::m_ownsPersistentManifoldPool [protected] |
Definition at line 63 of file btDefaultCollisionConfiguration.h.
bool btDefaultCollisionConfiguration::m_ownsStackAllocator [protected] |
Definition at line 60 of file btDefaultCollisionConfiguration.h.
Definition at line 71 of file btDefaultCollisionConfiguration.h.
Definition at line 62 of file btDefaultCollisionConfiguration.h.
int btDefaultCollisionConfiguration::m_persistentManifoldPoolSize [protected] |
Definition at line 57 of file btDefaultCollisionConfiguration.h.
Definition at line 89 of file btDefaultCollisionConfiguration.h.
Definition at line 70 of file btDefaultCollisionConfiguration.h.
Definition at line 80 of file btDefaultCollisionConfiguration.h.
Definition at line 87 of file btDefaultCollisionConfiguration.h.
Definition at line 59 of file btDefaultCollisionConfiguration.h.
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_swappedCompoundCreateFunc [protected] |
Definition at line 78 of file btDefaultCollisionConfiguration.h.
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_swappedConvexConcaveCreateFunc [protected] |
Definition at line 76 of file btDefaultCollisionConfiguration.h.
Definition at line 88 of file btDefaultCollisionConfiguration.h.

