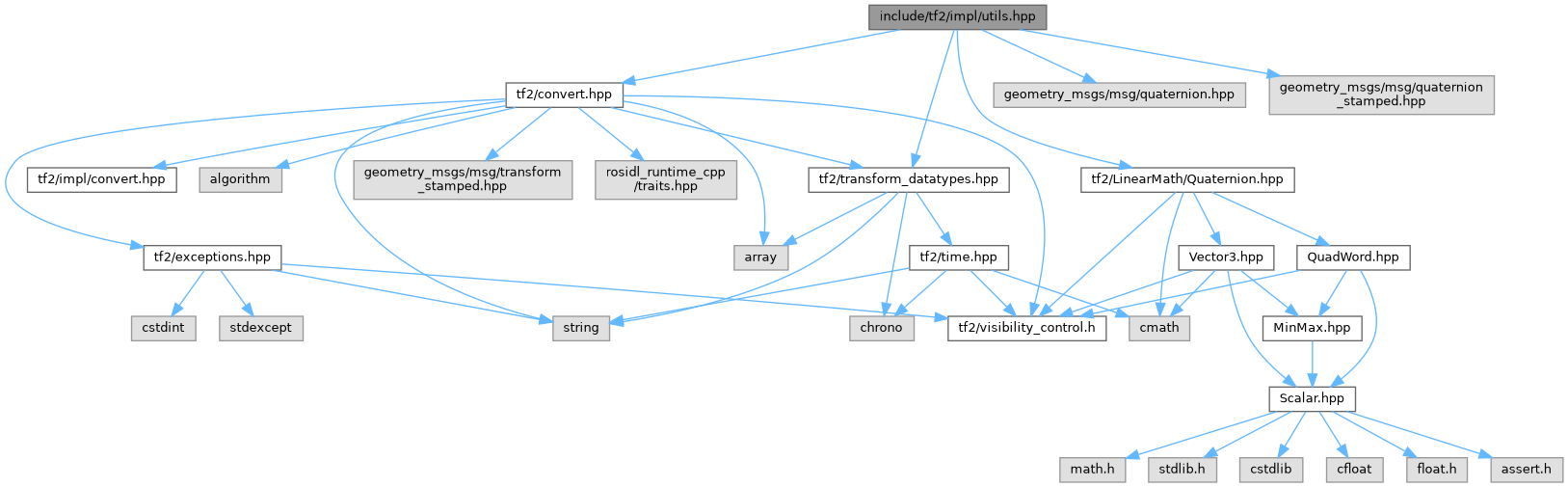
#include <tf2/convert.hpp>#include <tf2/transform_datatypes.hpp>#include <tf2/LinearMath/Quaternion.hpp>#include <geometry_msgs/msg/quaternion.hpp>#include <geometry_msgs/msg/quaternion_stamped.hpp>
Include dependency graph for utils.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | tf2 |
| namespace | tf2::impl |
Functions | |
| void | tf2::fromMsg (const geometry_msgs::msg::Quaternion &in, tf2::Quaternion &out) |
| tf2::Quaternion | tf2::impl::toQuaternion (const tf2::Quaternion &q) |
| tf2::Quaternion | tf2::impl::toQuaternion (const geometry_msgs::msg::Quaternion &q) |
| tf2::Quaternion | tf2::impl::toQuaternion (const geometry_msgs::msg::QuaternionStamped &q) |
| template<typename T > | |
| tf2::Quaternion | tf2::impl::toQuaternion (const tf2::Stamped< T > &t) |
| template<typename T > | |
| tf2::Quaternion | tf2::impl::toQuaternion (const T &t) |
| void | tf2::impl::getEulerYPR (const tf2::Quaternion &q, double &yaw, double &pitch, double &roll) |
| double | tf2::impl::getYaw (const tf2::Quaternion &q) |