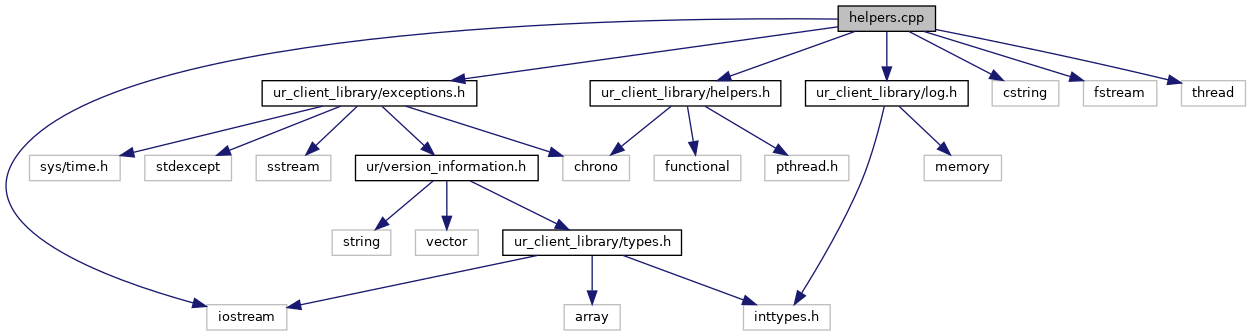
#include <ur_client_library/exceptions.h>#include <ur_client_library/helpers.h>#include <ur_client_library/log.h>#include <cstring>#include <fstream>#include <iostream>#include <thread>
Include dependency graph for helpers.cpp:
Go to the source code of this file.
Namespaces | |
| urcl | |
Functions | |
| bool | urcl::setFiFoScheduling (pthread_t &thread, const int priority) |
| void | urcl::waitFor (std::function< bool()> condition, const std::chrono::milliseconds timeout, const std::chrono::milliseconds check_interval=std::chrono::milliseconds(50)) |
| Wait for a condition to be true. More... | |
Variables | |
| const std::string | RT_DOC_URL = "https://docs.universal-robots.com/Universal_Robots_ROS_Documentation/doc/ur_client_library/doc/real_time.html" |
Detailed Description
- Date
- 2022-12-15
Definition in file helpers.cpp.
Variable Documentation
◆ RT_DOC_URL
| const std::string RT_DOC_URL = "https://docs.universal-robots.com/Universal_Robots_ROS_Documentation/doc/ur_client_library/doc/real_time.html" |
Definition at line 41 of file helpers.cpp.