|
| | Node (DriverPackPtr driver_pack) |
| |
| | Node (uavcan::ICanDriver &can_driver, uavcan::ISystemClock &clock) |
| |
| DriverPackPtr & | getDriverPack () |
| |
| const DriverPackPtr & | getDriverPack () const |
| |
| BlockingServiceClientPtr< DataType > | makeBlockingServiceClient () |
| |
| PublisherPtr< DataType > | makePublisher (uavcan::MonotonicDuration tx_timeout=uavcan::Publisher< DataType >::getDefaultTxTimeout()) |
| |
| ServiceClientPtr< DataType > | makeServiceClient (const typename uavcan::ServiceClient< DataType >::Callback &cb) |
| |
| ServiceServerPtr< DataType > | makeServiceServer (const typename uavcan::ServiceServer< DataType >::Callback &cb) |
| |
| SubscriberPtr< DataType > | makeSubscriber (const typename uavcan::Subscriber< DataType >::Callback &cb) |
| |
| TimerPtr | makeTimer (uavcan::MonotonicDuration period, const typename uavcan::Timer::Callback &cb) |
| |
| TimerPtr | makeTimer (uavcan::MonotonicTime deadline, const typename uavcan::Timer::Callback &cb) |
| |
| | NodeBase (DriverPackPtr driver_pack) |
| |
| | NodeBase (uavcan::ICanDriver &can_driver, uavcan::ISystemClock &clock) |
| |
| virtual RemoveReference< Allocator >::Type & | getAllocator () |
| |
| const protocol::HardwareVersion & | getHardwareVersion () const |
| |
| uint64_t | getInternalFailureCount () const |
| |
| Logger & | getLogger () |
| |
| const NodeStatusProvider::NodeName & | getName () const |
| |
| NodeStatusProvider & | getNodeStatusProvider () |
| |
| RestartRequestServer & | getRestartRequestServer () |
| |
| virtual Scheduler & | getScheduler () |
| |
| virtual const Scheduler & | getScheduler () const |
| |
| const protocol::SoftwareVersion & | getSoftwareVersion () const |
| |
| bool | isStarted () const |
| |
| | Node (ICanDriver &can_driver, ISystemClock &system_clock) |
| |
| | Node (ICanDriver &can_driver, ISystemClock &system_clock, IPoolAllocator &allocator) |
| |
| void | setHardwareVersion (const protocol::HardwareVersion &version) |
| |
| void | setHealthCritical () |
| |
| void | setHealthError () |
| |
| void | setHealthOk () |
| |
| void | setHealthWarning () |
| |
| void | setModeInitialization () |
| |
| void | setModeMaintenance () |
| |
| void | setModeOfflineAndPublish () |
| |
| void | setModeOperational () |
| |
| void | setModeSoftwareUpdate () |
| |
| void | setName (const NodeStatusProvider::NodeName &name) |
| |
| void | setRestartRequestHandler (IRestartRequestHandler *handler) |
| |
| void | setSoftwareVersion (const protocol::SoftwareVersion &version) |
| |
| void | setVendorSpecificStatusCode (NodeStatusProvider::VendorSpecificStatusCode code) |
| |
| int | spin (MonotonicDuration duration) |
| |
| int | spin (MonotonicTime deadline) |
| |
| int | spinOnce () |
| |
| int | start (const TransferPriority node_status_transfer_priority=TransferPriority::Default) |
| |
| void | logDebug (const char *source, const char *format, Args... args) |
| |
| void | logInfo (const char *source, const char *format, Args... args) |
| |
| void | logWarning (const char *source, const char *format, Args... args) |
| |
| void | logError (const char *source, const char *format, Args... args) |
| |
| Dispatcher & | getDispatcher () |
| |
| const Dispatcher & | getDispatcher () const |
| |
| MonotonicTime | getMonotonicTime () const |
| |
| NodeID | getNodeID () const |
| |
| virtual const Scheduler & | getScheduler () const =0 |
| |
| ISystemClock & | getSystemClock () |
| |
| UtcTime | getUtcTime () const |
| |
| int | injectTxFrame (const CanFrame &frame, MonotonicTime tx_deadline, uint8_t iface_mask, CanIOFlags flags=0) |
| |
| void | installRxFrameListener (IRxFrameListener *lst) |
| |
| bool | isPassiveMode () const |
| |
| void | removeRxFrameListener () |
| |
| bool | setNodeID (NodeID nid) |
| |
| int | spin (MonotonicDuration duration) |
| |
| int | spin (MonotonicTime deadline) |
| |
| int | spinOnce () |
| |
| virtual | ~INode () |
| |
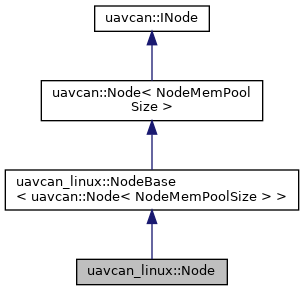
Wrapper for uavcan::Node with some additional convenience functions. Note that this wrapper adds stderr log sink to uavcan::Logger, which can be removed if needed. Do not instantiate this class directly; instead use the factory functions defined below.
Definition at line 308 of file platform_specific_components/linux/libuavcan/include/uavcan_linux/helpers.hpp.
 Protected Member Functions inherited from uavcan::Node< NodeMemPoolSize >
Protected Member Functions inherited from uavcan::Node< NodeMemPoolSize >