#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>#include <tsid/contacts/contact-6d.hpp>#include <tsid/contacts/contact-point.hpp>#include <tsid/formulations/inverse-dynamics-formulation-acc-force.hpp>#include <tsid/tasks/task-com-equality.hpp>#include <tsid/tasks/task-se3-equality.hpp>#include <tsid/tasks/task-joint-posture.hpp>#include <tsid/tasks/task-joint-bounds.hpp>#include <tsid/trajectories/trajectory-euclidian.hpp>#include <tsid/solvers/solver-HQP-factory.hxx>#include <tsid/solvers/utils.hpp>#include <tsid/utils/stop-watch.hpp>#include <tsid/utils/statistics.hpp>#include <tsid/math/utils.hpp>#include <pinocchio/algorithm/joint-configuration.hpp>#include <pinocchio/parsers/srdf.hpp>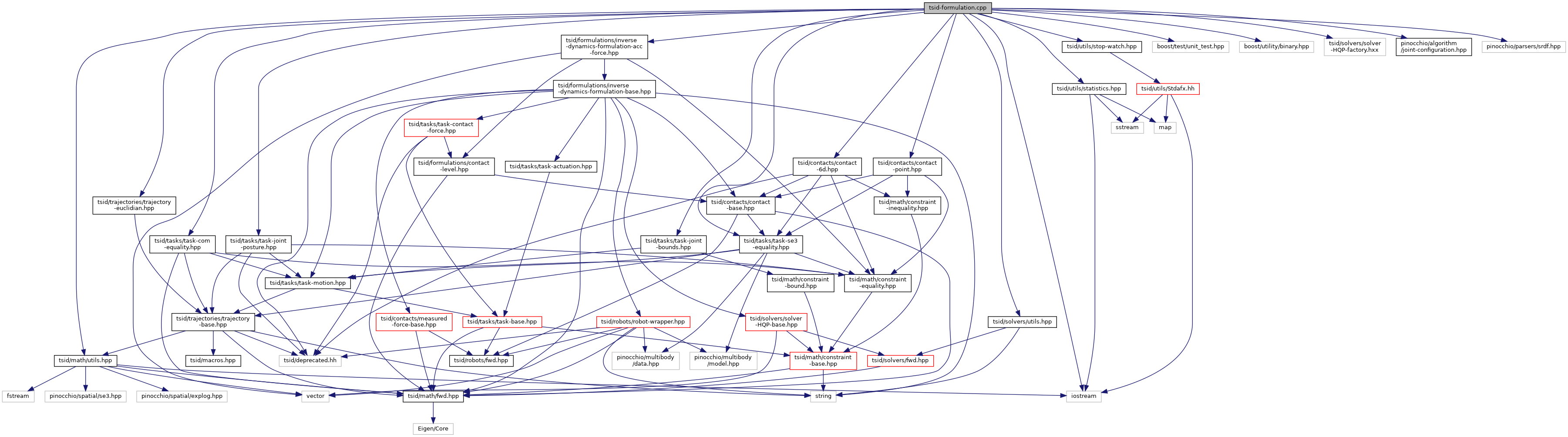
Go to the source code of this file.
Classes | |
| class | StandardRomeoInvDynCtrl |
Macros | |
| #define | CHECK_LESS_THAN(A, B) BOOST_CHECK_MESSAGE(A < B, #A << ": " << A << ">" << B) |
| #define | PROFILE_CONTROL_CYCLE "Control cycle" |
| #define | PROFILE_HQP "HQP" |
| #define | PROFILE_HQP_FAST "HQP_FAST" |
| #define | PROFILE_HQP_RT "HQP_RT" |
| #define | PROFILE_PROBLEM_FORMULATION "Problem formulation" |
| #define | REQUIRE_CONTACT_FINITE(contact) |
| #define | REQUIRE_FINITE(A) BOOST_REQUIRE_MESSAGE(isFinite(A), #A << ": " << A) |
| #define | REQUIRE_TASK_FINITE(task) |
Functions | |
| BOOST_AUTO_TEST_CASE (test_contact_point_invdyn_formulation_acc_force) | |
| BOOST_AUTO_TEST_CASE (test_invdyn_formulation_acc_force) | |
| BOOST_AUTO_TEST_CASE (test_invdyn_formulation_acc_force_computation_time) | |
| BOOST_AUTO_TEST_CASE (test_invdyn_formulation_acc_force_remove_contact) | |
Variables | |
| const int | max_it = 10 |
| const string | quadruped_model_path = TSID_SOURCE_DIR "/models/quadruped" |
| const string | romeo_model_path = TSID_SOURCE_DIR "/models/romeo" |
Macro Definition Documentation
◆ CHECK_LESS_THAN
Definition at line 50 of file tsid-formulation.cpp.
◆ PROFILE_CONTROL_CYCLE
| #define PROFILE_CONTROL_CYCLE "Control cycle" |
Definition at line 668 of file tsid-formulation.cpp.
◆ PROFILE_HQP
| #define PROFILE_HQP "HQP" |
Definition at line 670 of file tsid-formulation.cpp.
◆ PROFILE_HQP_FAST
| #define PROFILE_HQP_FAST "HQP_FAST" |
Definition at line 671 of file tsid-formulation.cpp.
◆ PROFILE_HQP_RT
| #define PROFILE_HQP_RT "HQP_RT" |
Definition at line 672 of file tsid-formulation.cpp.
◆ PROFILE_PROBLEM_FORMULATION
| #define PROFILE_PROBLEM_FORMULATION "Problem formulation" |
Definition at line 669 of file tsid-formulation.cpp.
◆ REQUIRE_CONTACT_FINITE
| #define REQUIRE_CONTACT_FINITE | ( | contact | ) |
Definition at line 57 of file tsid-formulation.cpp.
◆ REQUIRE_FINITE
Definition at line 49 of file tsid-formulation.cpp.
◆ REQUIRE_TASK_FINITE
| #define REQUIRE_TASK_FINITE | ( | task | ) |
Definition at line 53 of file tsid-formulation.cpp.
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/4]
| BOOST_AUTO_TEST_CASE | ( | test_contact_point_invdyn_formulation_acc_force | ) |
Definition at line 505 of file tsid-formulation.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/4]
| BOOST_AUTO_TEST_CASE | ( | test_invdyn_formulation_acc_force | ) |
Definition at line 333 of file tsid-formulation.cpp.
◆ BOOST_AUTO_TEST_CASE() [3/4]
| BOOST_AUTO_TEST_CASE | ( | test_invdyn_formulation_acc_force_computation_time | ) |
Definition at line 674 of file tsid-formulation.cpp.
◆ BOOST_AUTO_TEST_CASE() [4/4]
| BOOST_AUTO_TEST_CASE | ( | test_invdyn_formulation_acc_force_remove_contact | ) |
Definition at line 197 of file tsid-formulation.cpp.
Variable Documentation
◆ max_it
| const int max_it = 10 |
Definition at line 70 of file tsid-formulation.cpp.
◆ quadruped_model_path
| const string quadruped_model_path = TSID_SOURCE_DIR "/models/quadruped" |
Definition at line 67 of file tsid-formulation.cpp.
◆ romeo_model_path
| const string romeo_model_path = TSID_SOURCE_DIR "/models/romeo" |
Definition at line 66 of file tsid-formulation.cpp.