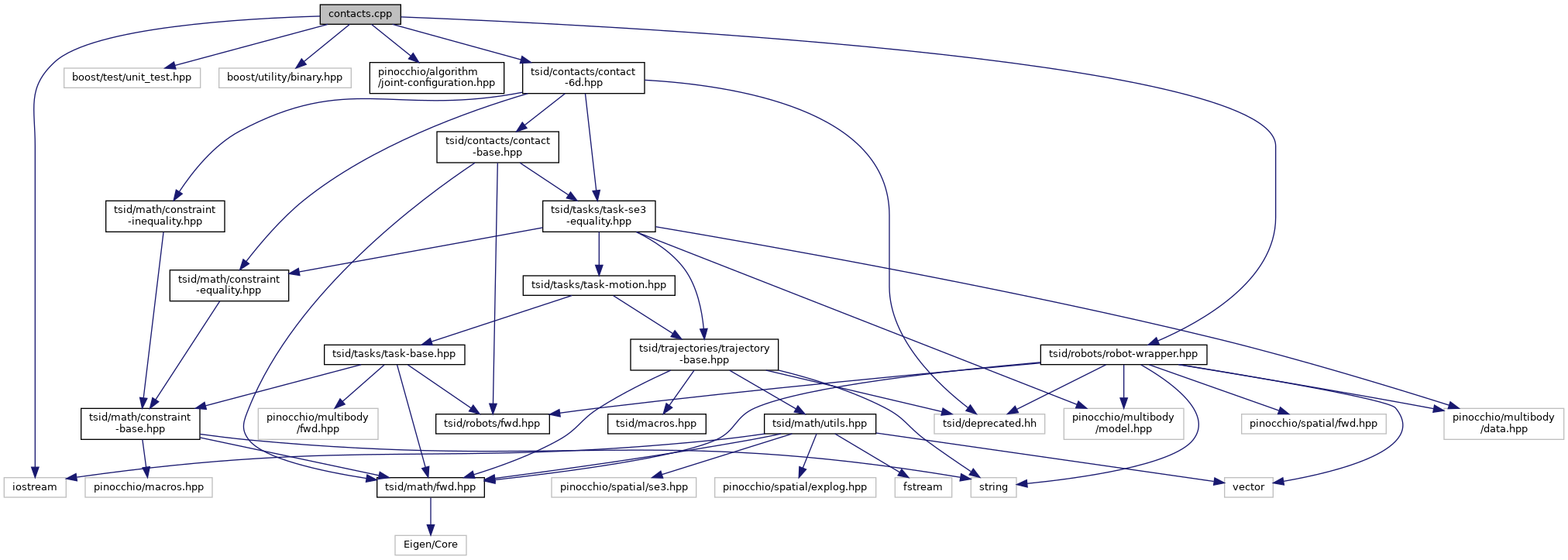
#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>#include <pinocchio/algorithm/joint-configuration.hpp>#include <tsid/contacts/contact-6d.hpp>#include <tsid/robots/robot-wrapper.hpp>
Include dependency graph for contacts.cpp:
Go to the source code of this file.
Macros | |
| #define | REQUIRE_FINITE(A) BOOST_REQUIRE_MESSAGE(isFinite(A), #A << ": " << A) |
Functions | |
| BOOST_AUTO_TEST_CASE (test_contact_6d) | |
Variables | |
| const string | romeo_model_path = TSID_SOURCE_DIR "/models/romeo" |
Macro Definition Documentation
◆ REQUIRE_FINITE
Definition at line 37 of file contacts.cpp.
Function Documentation
◆ BOOST_AUTO_TEST_CASE()
| BOOST_AUTO_TEST_CASE | ( | test_contact_6d | ) |
Definition at line 41 of file contacts.cpp.
Variable Documentation
◆ romeo_model_path
| const string romeo_model_path = TSID_SOURCE_DIR "/models/romeo" |
Definition at line 39 of file contacts.cpp.