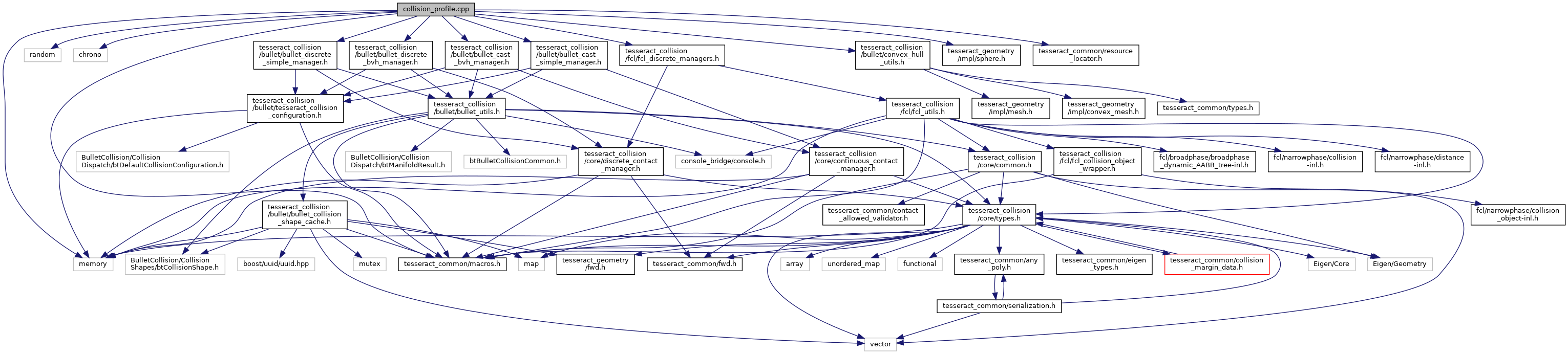
#include <tesseract_common/macros.h>#include <random>#include <chrono>#include <memory>#include <tesseract_collision/bullet/bullet_discrete_simple_manager.h>#include <tesseract_collision/bullet/bullet_discrete_bvh_manager.h>#include <tesseract_collision/bullet/bullet_cast_simple_manager.h>#include <tesseract_collision/bullet/bullet_cast_bvh_manager.h>#include <tesseract_collision/bullet/convex_hull_utils.h>#include <tesseract_collision/fcl/fcl_discrete_managers.h>#include <tesseract_geometry/impl/sphere.h>#include <tesseract_common/resource_locator.h>
Include dependency graph for collision_profile.cpp:
Go to the source code of this file.
Functions | |
| void | addCollisionObjects (ContinuousContactManager &checker, bool use_single_link, bool use_convex_mesh) |
| void | addCollisionObjects (DiscreteContactManager &checker, bool use_single_link, bool use_convex_mesh) |
| std::vector< Eigen::Isometry3d > | getTransforms (std::size_t num_poses) |
| int | main (int, char **) |
| void | runContinuousProfile (bool use_single_link, bool use_convex_mesh, double contact_distance) |
| void | runDiscreteProfile (bool use_single_link, bool use_convex_mesh, double contact_distance) |
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH static const TESSERACT_COMMON_IGNORE_WARNINGS_POP std::size_t | DIM = 10 |
Function Documentation
◆ addCollisionObjects() [1/2]
| void addCollisionObjects | ( | ContinuousContactManager & | checker, |
| bool | use_single_link, | ||
| bool | use_convex_mesh | ||
| ) |
Definition at line 93 of file collision_profile.cpp.
◆ addCollisionObjects() [2/2]
| void addCollisionObjects | ( | DiscreteContactManager & | checker, |
| bool | use_single_link, | ||
| bool | use_convex_mesh | ||
| ) |
Definition at line 22 of file collision_profile.cpp.
◆ getTransforms()
| std::vector<Eigen::Isometry3d> getTransforms | ( | std::size_t | num_poses | ) |
Definition at line 164 of file collision_profile.cpp.
◆ main()
| int main | ( | int | , |
| char ** | |||
| ) |
Definition at line 255 of file collision_profile.cpp.
◆ runContinuousProfile()
| void runContinuousProfile | ( | bool | use_single_link, |
| bool | use_convex_mesh, | ||
| double | contact_distance | ||
| ) |
Definition at line 215 of file collision_profile.cpp.
◆ runDiscreteProfile()
| void runDiscreteProfile | ( | bool | use_single_link, |
| bool | use_convex_mesh, | ||
| double | contact_distance | ||
| ) |
Definition at line 178 of file collision_profile.cpp.
Variable Documentation
◆ DIM
|
static |
Definition at line 17 of file collision_profile.cpp.