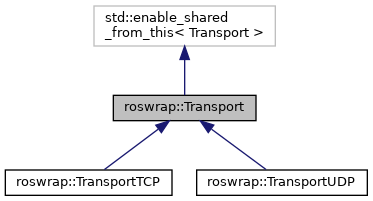
Abstract base class that allows abstraction of the transport type, eg. TCP, shared memory, UDP... More...
#include <transport.h>
Public Types | |
| typedef std::function< void(const TransportPtr &)> | Callback |
Public Member Functions | |
| virtual void | close ()=0 |
| Close this transport. Once this call has returned, writing on this transport should always return an error. More... | |
| virtual void | disableRead ()=0 |
| Disable reading on this transport. Allows derived classes to, for example, disable read polling for asynchronous sockets. More... | |
| virtual void | disableWrite ()=0 |
| Disable writing on this transport. Allows derived classes to, for example, disable write polling for asynchronous sockets. More... | |
| virtual void | enableRead ()=0 |
| Enable reading on this transport. Allows derived classes to, for example, enable read polling for asynchronous sockets. More... | |
| virtual void | enableWrite ()=0 |
| Enable writing on this transport. Allows derived classes to, for example, enable write polling for asynchronous sockets. More... | |
| virtual std::string | getTransportInfo ()=0 |
| Returns a string description of both the type of transport and who the transport is connected to. More... | |
| virtual const char * | getType ()=0 |
| Return a string that details the type of transport (Eg. TCPROS) More... | |
| virtual void | parseHeader (const Header &header) |
| Provides an opportunity for transport-specific options to come in through the header. More... | |
| virtual int32_t | read (uint8_t *buffer, uint32_t size)=0 |
| Read a number of bytes into the supplied buffer. Not guaranteed to actually read that number of bytes. More... | |
| virtual bool | requiresHeader () |
| Returns a boolean to indicate if the transport mechanism is reliable or not. More... | |
| void | setDisconnectCallback (const Callback &cb) |
| Set the function to call when this transport has disconnected, either through a call to close(). Or a disconnect from the remote host. More... | |
| void | setReadCallback (const Callback &cb) |
| Set the function to call when there is data available to be read by this transport. More... | |
| void | setWriteCallback (const Callback &cb) |
| Set the function to call when there is space available to write on this transport. More... | |
| Transport () | |
| virtual int32_t | write (uint8_t *buffer, uint32_t size)=0 |
| Write a number of bytes from the supplied buffer. Not guaranteed to actually write that number of bytes. More... | |
| virtual | ~Transport () |
Protected Member Functions | |
| bool | isHostAllowed (const std::string &host) const |
| returns true if the transport is allowed to connect to the host passed to it. More... | |
| bool | isOnlyLocalhostAllowed () const |
| returns true if this transport is only allowed to talk to localhost More... | |
Protected Attributes | |
| Callback | disconnect_cb_ |
| Callback | read_cb_ |
| Callback | write_cb_ |
Private Attributes | |
| std::vector< std::string > | allowed_hosts_ |
| bool | only_localhost_allowed_ |
Detailed Description
Abstract base class that allows abstraction of the transport type, eg. TCP, shared memory, UDP...
Definition at line 56 of file transport.h.
Member Typedef Documentation
◆ Callback
| typedef std::function<void(const TransportPtr&)> roswrap::Transport::Callback |
Definition at line 106 of file transport.h.
Constructor & Destructor Documentation
◆ Transport()
| roswrap::Transport::Transport | ( | ) |
◆ ~Transport()
|
inlinevirtual |
Definition at line 60 of file transport.h.
Member Function Documentation
◆ close()
|
pure virtual |
Close this transport. Once this call has returned, writing on this transport should always return an error.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ disableRead()
|
pure virtual |
Disable reading on this transport. Allows derived classes to, for example, disable read polling for asynchronous sockets.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ disableWrite()
|
pure virtual |
Disable writing on this transport. Allows derived classes to, for example, disable write polling for asynchronous sockets.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ enableRead()
|
pure virtual |
Enable reading on this transport. Allows derived classes to, for example, enable read polling for asynchronous sockets.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ enableWrite()
|
pure virtual |
Enable writing on this transport. Allows derived classes to, for example, enable write polling for asynchronous sockets.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ getTransportInfo()
|
pure virtual |
Returns a string description of both the type of transport and who the transport is connected to.
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ getType()
|
pure virtual |
Return a string that details the type of transport (Eg. TCPROS)
- Returns
- The stringified transport type
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ isHostAllowed()
|
protected |
returns true if the transport is allowed to connect to the host passed to it.
◆ isOnlyLocalhostAllowed()
|
inlineprotected |
returns true if this transport is only allowed to talk to localhost
Definition at line 148 of file transport.h.
◆ parseHeader()
Provides an opportunity for transport-specific options to come in through the header.
Reimplemented in roswrap::TransportTCP.
Definition at line 133 of file transport.h.
◆ read()
|
pure virtual |
Read a number of bytes into the supplied buffer. Not guaranteed to actually read that number of bytes.
- Parameters
-
buffer Buffer to read from size Size, in bytes, to read
- Returns
- The number of bytes actually read, or -1 if there was an error
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
◆ requiresHeader()
|
inlinevirtual |
Returns a boolean to indicate if the transport mechanism is reliable or not.
Reimplemented in roswrap::TransportUDP.
Definition at line 128 of file transport.h.
◆ setDisconnectCallback()
Set the function to call when this transport has disconnected, either through a call to close(). Or a disconnect from the remote host.
Definition at line 110 of file transport.h.
◆ setReadCallback()
Set the function to call when there is data available to be read by this transport.
Definition at line 114 of file transport.h.
◆ setWriteCallback()
Set the function to call when there is space available to write on this transport.
Definition at line 118 of file transport.h.
◆ write()
|
pure virtual |
Write a number of bytes from the supplied buffer. Not guaranteed to actually write that number of bytes.
- Parameters
-
buffer Buffer to write from size Size, in bytes, to write
- Returns
- The number of bytes actually written, or -1 if there was an error
Implemented in roswrap::TransportTCP, and roswrap::TransportUDP.
Member Data Documentation
◆ allowed_hosts_
|
private |
Definition at line 152 of file transport.h.
◆ disconnect_cb_
|
protected |
Definition at line 136 of file transport.h.
◆ only_localhost_allowed_
|
private |
Definition at line 151 of file transport.h.
◆ read_cb_
|
protected |
Definition at line 137 of file transport.h.
◆ write_cb_
|
protected |
Definition at line 138 of file transport.h.
The documentation for this class was generated from the following file: