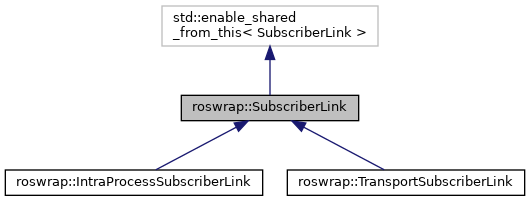
#include <subscriber_link.h>
Definition at line 51 of file subscriber_link.h.
◆ SubscriberLink()
| roswrap::SubscriberLink::SubscriberLink |
( |
| ) |
|
◆ ~SubscriberLink()
| virtual roswrap::SubscriberLink::~SubscriberLink |
( |
| ) |
|
|
virtual |
◆ drop()
| virtual void roswrap::SubscriberLink::drop |
( |
| ) |
|
|
pure virtual |
◆ enqueueMessage()
◆ getConnectionID()
| int roswrap::SubscriberLink::getConnectionID |
( |
| ) |
const |
|
inline |
◆ getDataType()
| const std::string& roswrap::SubscriberLink::getDataType |
( |
| ) |
|
◆ getDestinationCallerID()
| const std::string& roswrap::SubscriberLink::getDestinationCallerID |
( |
| ) |
const |
|
inline |
◆ getMD5Sum()
| const std::string& roswrap::SubscriberLink::getMD5Sum |
( |
| ) |
|
◆ getMessageDefinition()
| const std::string& roswrap::SubscriberLink::getMessageDefinition |
( |
| ) |
|
◆ getPublishTypes()
| virtual void roswrap::SubscriberLink::getPublishTypes |
( |
bool & |
ser, |
|
|
bool & |
nocopy, |
|
|
const std::type_info & |
ti |
|
) |
| |
|
inlinevirtual |
◆ getStats()
| const Stats& roswrap::SubscriberLink::getStats |
( |
| ) |
|
|
inline |
◆ getTopic()
| const std::string& roswrap::SubscriberLink::getTopic |
( |
| ) |
const |
|
inline |
◆ getTransportInfo()
| virtual std::string roswrap::SubscriberLink::getTransportInfo |
( |
| ) |
|
|
pure virtual |
◆ getTransportType()
| virtual std::string roswrap::SubscriberLink::getTransportType |
( |
| ) |
|
|
pure virtual |
◆ isIntraprocess()
| virtual bool roswrap::SubscriberLink::isIntraprocess |
( |
| ) |
|
|
inlinevirtual |
◆ verifyDatatype()
| bool roswrap::SubscriberLink::verifyDatatype |
( |
const std::string & |
datatype | ) |
|
|
protected |
◆ connection_id_
| unsigned int roswrap::SubscriberLink::connection_id_ |
|
protected |
◆ destination_caller_id_
| std::string roswrap::SubscriberLink::destination_caller_id_ |
|
protected |
◆ parent_
◆ stats_
| Stats roswrap::SubscriberLink::stats_ |
|
protected |
◆ topic_
| std::string roswrap::SubscriberLink::topic_ |
|
protected |
The documentation for this class was generated from the following file: