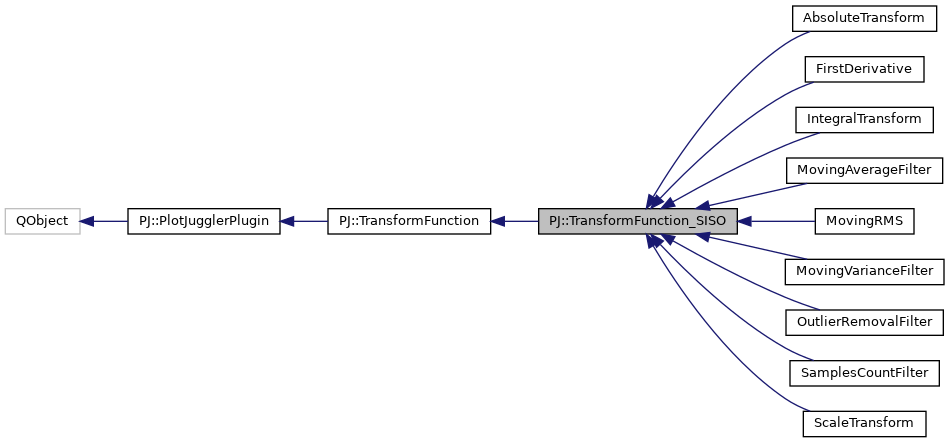
Simplified version with Single input and Single output. More...
#include <transform_function.h>
Public Member Functions | |
| void | calculate () override |
| virtual std::optional< PlotData::Point > | calculateNextPoint (size_t index)=0 |
| const PlotData * | dataSource () const |
| int | numInputs () const override |
| int | numOutputs () const override |
| void | reset () override |
| TransformFunction_SISO ()=default | |
 Public Member Functions inherited from PJ::TransformFunction Public Member Functions inherited from PJ::TransformFunction | |
| std::vector< const PlotData * > & | dataSources () |
| virtual const char * | name () const =0 |
| Name of the plugin type, NOT the particular instance. More... | |
| unsigned | order () const |
| PlotDataMapRef * | plotData () |
| virtual void | setData (PlotDataMapRef *data, const std::vector< const PlotData * > &src_vect, std::vector< PlotData * > &dst_vect) |
| TransformFunction () | |
| virtual | ~TransformFunction ()=default |
| Public Member Functions inherited from PJ::PlotJugglerPlugin | |
| virtual const std::vector< QAction * > & | availableActions () |
| virtual bool | isDebugPlugin () |
| virtual QWidget * | optionsWidget () |
| optionsWidget pointer to a persistent widget used to set the plugin options . More... | |
| PlotJugglerPlugin ()=default | |
| virtual bool | xmlLoadState (const QDomElement &parent_element) |
| Override this method to load the status of the plugin from XML. More... | |
| QDomElement | xmlSaveState (QDomDocument &doc) const |
| virtual bool | xmlSaveState (QDomDocument &doc, QDomElement &parent_element) const |
| Override this method to save the status of the plugin to XML. More... | |
Protected Attributes | |
| double | _last_timestamp = std::numeric_limits<double>::lowest() |
| Protected Attributes inherited from PJ::TransformFunction | |
| PlotDataMapRef * | _data |
| std::vector< PlotData * > | _dst_vector |
| unsigned | _order |
| std::vector< const PlotData * > | _src_vector |
Additional Inherited Members | |
| Public Types inherited from PJ::TransformFunction | |
| using | Ptr = std::shared_ptr< TransformFunction > |
| Signals inherited from PJ::TransformFunction | |
| void | parametersChanged () |
Detailed Description
Simplified version with Single input and Single output.
Definition at line 88 of file transform_function.h.
Constructor & Destructor Documentation
◆ TransformFunction_SISO()
|
default |
Member Function Documentation
◆ calculate()
|
overridevirtual |
Implements PJ::TransformFunction.
Definition at line 45 of file transform_function.cpp.
◆ calculateNextPoint()
|
pure virtual |
Method to be implemented by the user to apply a statefull function to each point. Index will increase monotonically, unless reset() is used.
Implemented in MovingAverageFilter, MovingRMS, MovingVarianceFilter, OutlierRemovalFilter, SamplesCountFilter, ScaleTransform, IntegralTransform, FirstDerivative, and AbsoluteTransform.
◆ dataSource()
| const PlotData * PJ::TransformFunction_SISO::dataSource | ( | ) | const |
Definition at line 113 of file transform_function.cpp.
◆ numInputs()
|
inlineoverridevirtual |
Number of inputs. Return -1 if it is not a constant.
When numInputs() > 0, then the data will be initialized using the method: setDataSource(const std::vector<const PlotData*>& src_data)
When numInputs() == -1, then the number of inputs is undefined and the data will be initialized using the method_ setDataSource( PlotDataMapRef* data )
Implements PJ::TransformFunction.
Definition at line 96 of file transform_function.h.
◆ numOutputs()
|
inlineoverridevirtual |
Number of outputs. Define the size of the vector used in: calculate(std::vector<PlotData*>& dst_data)
Implements PJ::TransformFunction.
Definition at line 101 of file transform_function.h.
◆ reset()
|
overridevirtual |
Clear the cache, state and any stored data
Reimplemented from PJ::TransformFunction.
Definition at line 40 of file transform_function.cpp.
Member Data Documentation
◆ _last_timestamp
|
protected |
Definition at line 115 of file transform_function.h.
The documentation for this class was generated from the following files: