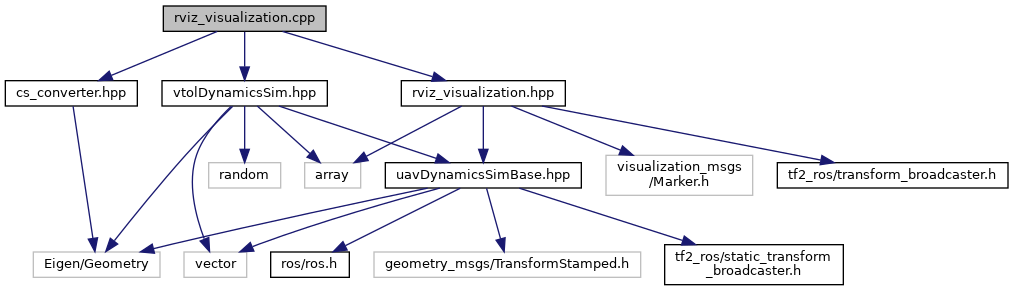
Include dependency graph for rviz_visualization.cpp:
Go to the source code of this file.
Variables | |
| static const char | GLOBAL_FRAME_ID [] = "world" |
| static const std::array< std::string, 5 > | MOTOR_NAMES = {"motor0", "motor1", "motor2", "motor3", "ICE"} |
| static const constexpr uint8_t | PX4_NED_FRD = 0 |
| static const constexpr uint8_t | ROS_ENU_FLU = 1 |
| static const char | UAV_FIXED_FRAME_ID [] = "uav/com" |
| static const char | UAV_FRAME_ID [] = "uav/enu" |
Variable Documentation
◆ GLOBAL_FRAME_ID
|
static |
Definition at line 27 of file rviz_visualization.cpp.
◆ MOTOR_NAMES
|
static |
Definition at line 26 of file rviz_visualization.cpp.
◆ PX4_NED_FRD
|
staticconstexpr |
Definition at line 23 of file rviz_visualization.cpp.
◆ ROS_ENU_FLU
|
staticconstexpr |
Definition at line 24 of file rviz_visualization.cpp.
◆ UAV_FIXED_FRAME_ID
|
static |
Definition at line 29 of file rviz_visualization.cpp.
◆ UAV_FRAME_ID
|
static |
Definition at line 28 of file rviz_visualization.cpp.