Demonstration of the full Attitude-Bias-Calibration Equivariant Filter. More...
#include "ABC_EQF.h"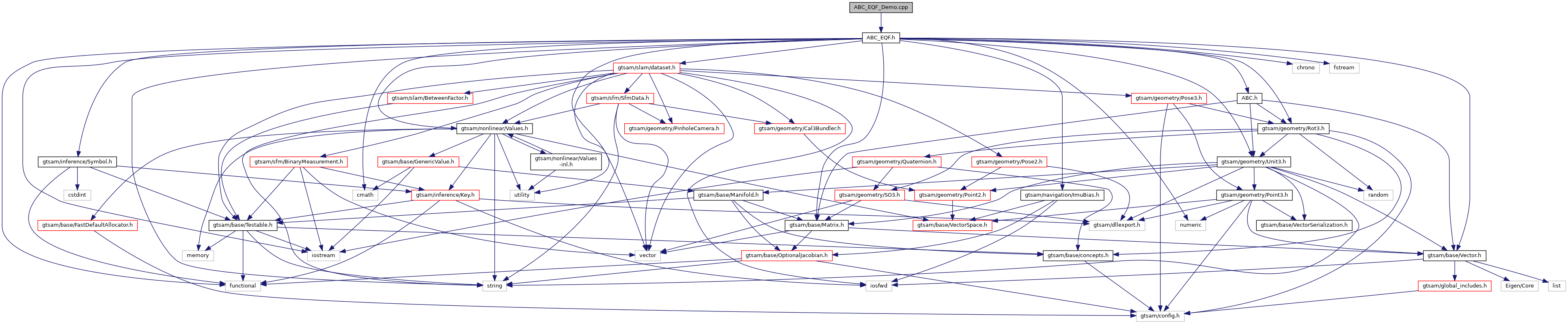
Go to the source code of this file.
Classes | |
| struct | Data |
| Data structure for ground-truth, input and output data. More... | |
Typedefs | |
| using | EqFilter = abc_eqf_lib::EqF< N > |
| using | Group = abc_eqf_lib::G< N > |
| using | M = abc_eqf_lib::State< N > |
Functions | |
| std::vector< Data > | loadDataFromCSV (const std::string &filename, int startRow=0, int maxRows=-1, int downsample=1) |
| int | main (int argc, char *argv[]) |
| void | processDataWithEqF (EqFilter &filter, const std::vector< Data > &data_list, int printInterval=10) |
| Process data with EqF and print summary results. More... | |
Variables | |
| constexpr size_t | N = 1 |
Detailed Description
Demonstration of the full Attitude-Bias-Calibration Equivariant Filter.
This demo shows the Equivariant Filter (EqF) for attitude estimation with both gyroscope bias and sensor extrinsic calibration, based on the paper: "Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration" by Fornasier et al. Authors: Darshan Rajasekaran & Jennifer Oum
Definition in file ABC_EQF_Demo.cpp.
Typedef Documentation
◆ EqFilter
| using EqFilter = abc_eqf_lib::EqF<N> |
Definition at line 19 of file ABC_EQF_Demo.cpp.
◆ Group
| using Group = abc_eqf_lib::G<N> |
Definition at line 18 of file ABC_EQF_Demo.cpp.
◆ M
| using M = abc_eqf_lib::State<N> |
Definition at line 17 of file ABC_EQF_Demo.cpp.
Function Documentation
◆ loadDataFromCSV()
| std::vector< Data > loadDataFromCSV | ( | const std::string & | filename, |
| int | startRow = 0, |
||
| int | maxRows = -1, |
||
| int | downsample = 1 |
||
| ) |
Load data from CSV file into a vector of Data objects for the EqF
CSV format:
- t: Time
- q_w, q_x, q_y, q_z: True attitude quaternion
- b_x, b_y, b_z: True bias
- cq_w_0, cq_x_0, cq_y_0, cq_z_0: True calibration quaternion
- w_x, w_y, w_z: Angular velocity measurements
- std_w_x, std_w_y, std_w_z: Angular velocity measurement standard deviations
- std_b_x, std_b_y, std_b_z: Bias process noise standard deviations
- y_x_0, y_y_0, y_z_0, y_x_1, y_y_1, y_z_1: Direction measurements
- std_y_x_0, std_y_y_0, std_y_z_0, std_y_x_1, std_y_y_1, std_y_z_1: Direction measurement standard deviations
- d_x_0, d_y_0, d_z_0, d_x_1, d_y_1, d_z_1: Reference directions
Definition at line 74 of file ABC_EQF_Demo.cpp.
◆ main()
Definition at line 375 of file ABC_EQF_Demo.cpp.
◆ processDataWithEqF()
| void processDataWithEqF | ( | EqFilter & | filter, |
| const std::vector< Data > & | data_list, | ||
| int | printInterval = 10 |
||
| ) |
Process data with EqF and print summary results.
Takes in the data and runs an EqF on it and reports the results.
Definition at line 223 of file ABC_EQF_Demo.cpp.
Variable Documentation
◆ N
|
constexpr |
Definition at line 16 of file ABC_EQF_Demo.cpp.