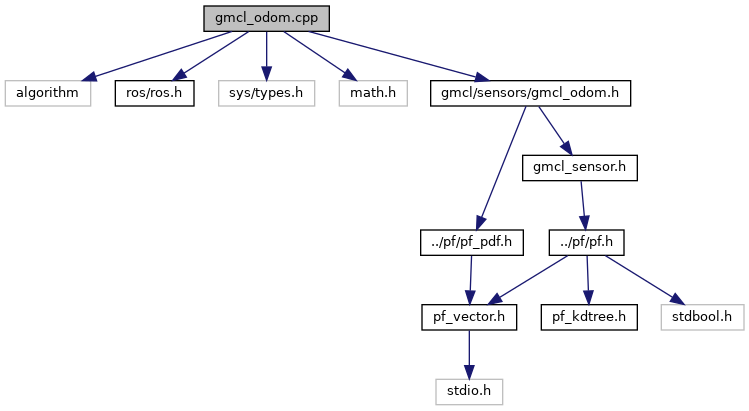
#include <algorithm>#include "ros/ros.h"#include <sys/types.h>#include <math.h>#include "gmcl/sensors/gmcl_odom.h"
Include dependency graph for gmcl_odom.cpp:
Go to the source code of this file.
Functions | |
| static double | angle_diff (double a, double b) |
| static double | normalize (double z) |
Function Documentation
◆ angle_diff()
|
static |
Definition at line 53 of file gmcl_odom.cpp.
◆ normalize()
|
static |
Definition at line 48 of file gmcl_odom.cpp.