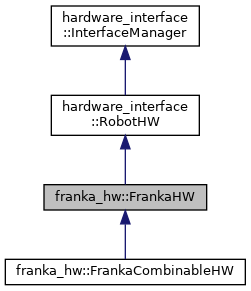
This class wraps the functionality of libfranka for controlling Panda robots into the ros_control framework. More...
#include <franka_hw.h>
Classes | |
| struct | CollisionConfig |
Public Member Functions | |
| virtual bool | checkForConflict (const std::list< hardware_interface::ControllerInfo > &info) const override |
| Checks whether a requested controller can be run, based on the resources and interfaces it claims. More... | |
| virtual void | checkJointLimits () |
| Checks the proximity of each joint to its joint position limits and prints a warning whenever a joint is close to a limit. More... | |
| virtual void | connect () |
| Create a libfranka robot, connecting the hardware class to the master controller. More... | |
| virtual bool | connected () |
| Checks whether the hardware class is connected to a robot. More... | |
| virtual void | control (const std::function< bool(const ros::Time &, const ros::Duration &)> &ros_callback) |
| Runs the currently active controller in a realtime loop. More... | |
| virtual bool | controllerActive () const noexcept |
| Indicates whether there is an active controller. More... | |
| virtual bool | disconnect () |
| Tries to disconnect the hardware class from the robot, freeing it for e.g. More... | |
| virtual void | doSwitch (const std::list< hardware_interface::ControllerInfo > &, const std::list< hardware_interface::ControllerInfo > &) override |
| Performs controller switching (real-time capable). More... | |
| virtual void | enforceLimits (const ros::Duration &period) |
| Enforces limits on position, velocity, and torque level. More... | |
| FrankaHW () | |
| Default constructor. More... | |
| virtual std::array< double, 7 > | getJointEffortCommand () const noexcept |
| Gets the current joint torque command. More... | |
| virtual std::array< double, 7 > | getJointPositionCommand () const noexcept |
| Gets the current joint position command. More... | |
| virtual std::array< double, 7 > | getJointVelocityCommand () const noexcept |
| Gets the current joint velocity command. More... | |
| virtual bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) override |
| Initializes the FrankaHW class to be fully operational. More... | |
| virtual bool | initParameters (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) |
| Reads the parameterization of the hardware class from the ROS parameter server (e.g. More... | |
| virtual void | initROSInterfaces (ros::NodeHandle &robot_hw_nh) |
| Initializes the class in terms of ros_control interfaces. More... | |
| virtual bool | prepareSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) override |
| Prepares switching between controllers (not real-time capable). More... | |
| virtual void | read (const ros::Time &time, const ros::Duration &period) override |
| Reads data from the franka robot. More... | |
| virtual void | reset () |
| Resets the limit interfaces. More... | |
| virtual franka::Robot & | robot () const |
| Getter for the libfranka robot instance. More... | |
| virtual std::mutex & | robotMutex () |
| Getter for the mutex protecting access to the libfranka::robot class. More... | |
| virtual void | setupParameterCallbacks (ros::NodeHandle &robot_hw_nh) |
| Initializes the callbacks for on-the-fly reading the parameters for rate limiting, internal controllers and cutoff frequency. More... | |
| virtual void | update (const franka::RobotState &robot_state) |
| Updates the controller interfaces from the given robot state. More... | |
| virtual void | write (const ros::Time &time, const ros::Duration &period) override |
| Writes data to the franka robot. More... | |
| virtual | ~FrankaHW () override=default |
 Public Member Functions inherited from hardware_interface::RobotHW Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual SwitchState | switchResult () const |
| virtual SwitchState | switchResult (const ControllerInfo &) const |
| virtual | ~RobotHW ()=default |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Static Public Member Functions | |
| static bool | commandHasNaN (const franka::CartesianPose &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::CartesianVelocities &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::JointPositions &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::JointVelocities &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::Torques &command) |
| Checks a command for NaN values. More... | |
| static std::vector< double > | getCollisionThresholds (const std::string &name, const ros::NodeHandle &robot_hw_nh, const std::vector< double > &defaults) |
| Parses a set of collision thresholds from the parameter server. More... | |
Protected Types | |
| using | Callback = std::function< bool(const franka::RobotState &, franka::Duration)> |
| Protected Types inherited from hardware_interface::InterfaceManager | |
| typedef std::vector< InterfaceManager * > | InterfaceManagerVector |
| typedef std::map< std::string, void * > | InterfaceMap |
| typedef std::map< std::string, std::vector< std::string > > | ResourceMap |
| typedef std::map< std::string, size_t > | SizeMap |
Protected Member Functions | |
| template<typename T > | |
| T | controlCallback (const T &command, Callback ros_callback, const franka::RobotState &robot_state, franka::Duration time_step) |
| Callback for the libfranka control loop. More... | |
| virtual void | initRobot () |
| Uses the robot_ip_ to connect to the robot via libfranka and loads the libfranka model. More... | |
| virtual bool | setRunFunction (const ControlMode &requested_control_mode, bool limit_rate, double cutoff_frequency, franka::ControllerMode internal_controller) |
| Configures the run function which is used as libfranka control callback based on the requested control mode. More... | |
| virtual void | setupFrankaCartesianPoseInterface (franka::CartesianPose &pose_cartesian_command) |
| Configures and registers the command interface for Cartesian poses in ros_control. More... | |
| virtual void | setupFrankaCartesianVelocityInterface (franka::CartesianVelocities &velocity_cartesian_command) |
| Configures and registers the command interface for Cartesian velocities in ros_control. More... | |
| virtual void | setupFrankaModelInterface (franka::RobotState &robot_state) |
| Configures and registers the model interface offering kinematics and dynamics in ros_control. More... | |
| virtual void | setupFrankaStateInterface (franka::RobotState &robot_state) |
| Configures and registers the state interface offering the full franka::RobotState in ros_control. More... | |
| template<typename T > | |
| void | setupJointCommandInterface (std::array< double, 7 > &command, franka::RobotState &state, bool use_q_d, T &interface) |
| Configures and registers a joint command interface for positions velocities or efforts in ros_control. More... | |
| virtual void | setupJointStateInterface (franka::RobotState &robot_state) |
| Configures and registers the joint state interface in ros_control. More... | |
| template<typename T > | |
| void | setupLimitInterface (joint_limits_interface::JointLimitsInterface< T > &limit_interface, hardware_interface::JointCommandInterface &command_interface) |
| Configures a limit interface to enforce limits on effort, velocity or position level on joint commands. More... | |
Static Protected Member Functions | |
| template<size_t size> | |
| static bool | arrayHasNaN (const std::array< double, size > &array) |
| Checks whether an array of doubles contains NaN values. More... | |
Additional Inherited Members | |
| Public Types inherited from hardware_interface::RobotHW | |
| enum | SwitchState { SwitchState::DONE, SwitchState::ONGOING, SwitchState::ERROR } |
Detailed Description
This class wraps the functionality of libfranka for controlling Panda robots into the ros_control framework.
Definition at line 38 of file franka_hw.h.
Member Typedef Documentation
◆ Callback
|
protected |
Definition at line 311 of file franka_hw.h.
Constructor & Destructor Documentation
◆ FrankaHW()
| franka_hw::FrankaHW::FrankaHW | ( | ) |
Default constructor.
Note: Be sure to call the init() method before operation.
Definition at line 45 of file franka_hw.cpp.
◆ ~FrankaHW()
|
overridevirtualdefault |
Member Function Documentation
◆ arrayHasNaN()
|
inlinestaticprotected |
Checks whether an array of doubles contains NaN values.
- Parameters
-
[in] command array The array to check.
- Returns
- True if the array contains NaN values, false otherwise.
Definition at line 307 of file franka_hw.h.
◆ checkForConflict()
|
overridevirtual |
Checks whether a requested controller can be run, based on the resources and interfaces it claims.
- Parameters
-
[in] info Controllers to be running at the same time.
- Returns
- True in case of a conflict, false in case of valid controllers.
Reimplemented from hardware_interface::RobotHW.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 253 of file franka_hw.cpp.
◆ checkJointLimits()
|
virtual |
Checks the proximity of each joint to its joint position limits and prints a warning whenever a joint is close to a limit.
Definition at line 334 of file franka_hw.cpp.
◆ commandHasNaN() [1/5]
|
static |
Checks a command for NaN values.
- Parameters
-
[in] command The command to check.
- Returns
- True if the command contains NaN, false otherwise.
Definition at line 593 of file franka_hw.cpp.
◆ commandHasNaN() [2/5]
|
static |
Checks a command for NaN values.
- Parameters
-
[in] command The command to check.
- Returns
- True if the command contains NaN, false otherwise.
Definition at line 597 of file franka_hw.cpp.
◆ commandHasNaN() [3/5]
|
static |
Checks a command for NaN values.
- Parameters
-
[in] command The command to check.
- Returns
- True if the command contains NaN, false otherwise.
Definition at line 585 of file franka_hw.cpp.
◆ commandHasNaN() [4/5]
|
static |
Checks a command for NaN values.
- Parameters
-
[in] command The command to check.
- Returns
- True if the command contains NaN, false otherwise.
Definition at line 589 of file franka_hw.cpp.
◆ commandHasNaN() [5/5]
|
static |
Checks a command for NaN values.
- Parameters
-
[in] command The command to check.
- Returns
- True if the command contains NaN, false otherwise.
Definition at line 581 of file franka_hw.cpp.
◆ connect()
|
virtual |
Create a libfranka robot, connecting the hardware class to the master controller.
Note: While the robot is connected, no DESK based tasks can be executed.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 179 of file franka_hw.cpp.
◆ connected()
|
virtual |
Checks whether the hardware class is connected to a robot.
- Returns
- true if connected, false otherwise.
Definition at line 204 of file franka_hw.cpp.
◆ control()
|
virtual |
Runs the currently active controller in a realtime loop.
If no controller is active, the function immediately exits. When running a controller, the function only exits when ros_callback returns false.
- Parameters
-
[in] ros_callback A callback function that is executed at each time step and runs all ROS-side functionality of the hardware. Execution is stopped if it returns false.
- Exceptions
-
franka::ControlException if an error related to torque control or motion generation occurred. franka::InvalidOperationException if a conflicting operation is already running. franka::NetworkException if the connection is lost, e.g. after a timeout. franka::RealtimeException if realtime priority cannot be set for the current thread.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 221 of file franka_hw.cpp.
◆ controlCallback()
|
inlineprotected |
Callback for the libfranka control loop.
This method is designed to incorporate a second callback named ros_callback that will be called on each iteration of the callback.
- Parameters
-
[in] command The datafield containing the command to send to the robot. [in] ros_callback An additional callback that is executed every time step. [in] robot_state The current robot state to compute commands with. [in] time_step Time since last call to the callback.
- Exceptions
-
std::invalid_argument When a command contains NaN values.
- Returns
- The command to be sent to the robot via libfranka.
Definition at line 326 of file franka_hw.h.
◆ controllerActive()
|
virtualnoexcept |
Indicates whether there is an active controller.
- Returns
- True if a controller is currently active, false otherwise.
Definition at line 213 of file franka_hw.cpp.
◆ disconnect()
|
virtual |
Tries to disconnect the hardware class from the robot, freeing it for e.g.
DESK-based tasks. Note: Disconnecting is only possible when no controller is actively running.
- Returns
- true if successfully disconnected, false otherwise.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 194 of file franka_hw.cpp.
◆ doSwitch()
|
overridevirtual |
Performs controller switching (real-time capable).
Reimplemented from hardware_interface::RobotHW.
Definition at line 268 of file franka_hw.cpp.
◆ enforceLimits()
|
virtual |
Enforces limits on position, velocity, and torque level.
- Parameters
-
[in] period The duration of the current cycle.
Definition at line 245 of file franka_hw.cpp.
◆ getCollisionThresholds()
|
static |
Parses a set of collision thresholds from the parameter server.
The methods returns the default values if no parameter was found or the size of the array did not match the defaults dimension.
- Parameters
-
[in] name The name of the parameter to look for. [in] robot_hw_nh A node handle in the namespace of the robot hardware. [in] defaults A set of default values that also specify the size the parameter must have to be valid.
- Returns
- A set parsed parameters if valid parameters where found, the default values otherwise.
Definition at line 601 of file franka_hw.cpp.
◆ getJointEffortCommand()
|
virtualnoexcept |
Gets the current joint torque command.
- Returns
- The current joint torque command.
Definition at line 326 of file franka_hw.cpp.
◆ getJointPositionCommand()
|
virtualnoexcept |
Gets the current joint position command.
- Returns
- The current joint position command.
Definition at line 318 of file franka_hw.cpp.
◆ getJointVelocityCommand()
|
virtualnoexcept |
Gets the current joint velocity command.
- Returns
- The current joint velocity command.
Definition at line 322 of file franka_hw.cpp.
◆ init()
|
overridevirtual |
Initializes the FrankaHW class to be fully operational.
This involves parsing required configurations from the ROS parameter server, connecting to the robot and setting up interfaces for the ros_control framework.
- Parameters
-
[in] root_nh A node handle in the root namespace of the control node. [in] robot_hw_nh A node handle in the namespace of the robot hardware.
- Returns
- True if successful, false otherwise.
Reimplemented from hardware_interface::RobotHW.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 59 of file franka_hw.cpp.
◆ initParameters()
|
virtual |
Reads the parameterization of the hardware class from the ROS parameter server (e.g.
arm_id, robot_ip joint_names etc.)
- Parameters
-
[in] root_nh A node handle in the root namespace of the control node. [in] robot_hw_nh A node handle in the namespace of the robot hardware.
- Returns
- True if successful, false otherwise.
Definition at line 82 of file franka_hw.cpp.
◆ initRobot()
|
protectedvirtual |
Uses the robot_ip_ to connect to the robot via libfranka and loads the libfranka model.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 546 of file franka_hw.cpp.
◆ initROSInterfaces()
|
virtual |
Initializes the class in terms of ros_control interfaces.
Note: You have to call initParameters beforehand. Use the complete initialization routine init() method to control robots.
- Parameters
-
[in] robot_hw_nh A node handle in the namespace of the robot hardware.
- Returns
- True if successful, false otherwise.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 526 of file franka_hw.cpp.
◆ prepareSwitch()
|
overridevirtual |
Prepares switching between controllers (not real-time capable).
- Parameters
-
[in] start_list Controllers requested to be started. [in] stop_list Controllers requested to be stopped.
- Returns
- True if the preparation has been successful, false otherwise.
Reimplemented from hardware_interface::RobotHW.
Definition at line 277 of file franka_hw.cpp.
◆ read()
|
overridevirtual |
Reads data from the franka robot.
- Parameters
-
[in] time The current time. [in] period The time passed since the last call to read.
Reimplemented from hardware_interface::RobotHW.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 379 of file franka_hw.cpp.
◆ reset()
|
virtual |
Resets the limit interfaces.
Definition at line 330 of file franka_hw.cpp.
◆ robot()
|
virtual |
Getter for the libfranka robot instance.
- Exceptions
-
std::logic_error in case the robot is not connected or the class in not initialized
Definition at line 369 of file franka_hw.cpp.
◆ robotMutex()
|
virtual |
Getter for the mutex protecting access to the libfranka::robot class.
This enables thread-safe access to robot().
- Returns
- A reference to the robot mutex.
Definition at line 217 of file franka_hw.cpp.
◆ setRunFunction()
|
protectedvirtual |
Configures the run function which is used as libfranka control callback based on the requested control mode.
- Parameters
-
[in] requested_control_mode The control mode to configure (e.g. torque/position/velocity etc.) [in] limit_rate Flag to enable/disable rate limiting to smoothen the commands. [in] cutoff_frequency The cutoff frequency applied for command smoothing. [in] internal_controller The internal controller to use when using position or velocity modes.
- Returns
- True if successful, false otherwise.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 435 of file franka_hw.cpp.
◆ setupFrankaCartesianPoseInterface()
|
protectedvirtual |
Configures and registers the command interface for Cartesian poses in ros_control.
- Parameters
-
[in] pose_cartesian_command The data field holding the command to execute.
Definition at line 410 of file franka_hw.cpp.
◆ setupFrankaCartesianVelocityInterface()
|
protectedvirtual |
Configures and registers the command interface for Cartesian velocities in ros_control.
- Parameters
-
[in] velocity_cartesian_command The data field holding the command to execute.
Definition at line 418 of file franka_hw.cpp.
◆ setupFrankaModelInterface()
|
protectedvirtual |
Configures and registers the model interface offering kinematics and dynamics in ros_control.
- Parameters
-
[in] robot_state A reference to the data field storing the current robot state. This state is used to evaluate model qunatities (by default) at the current state.
Definition at line 427 of file franka_hw.cpp.
◆ setupFrankaStateInterface()
|
protectedvirtual |
Configures and registers the state interface offering the full franka::RobotState in ros_control.
- Parameters
-
[in] robot_state The data field holding the updated robot state.
Definition at line 404 of file franka_hw.cpp.
◆ setupJointCommandInterface()
|
inlineprotected |
Configures and registers a joint command interface for positions velocities or efforts in ros_control.
- Parameters
-
[in] command The data field holding the command to execute. [in] state The data field holding the updated robot state. [in] use_q_d Flag to configure using desired values as joint_states. [out] interface The command interface to configure.
Definition at line 408 of file franka_hw.h.
◆ setupJointStateInterface()
|
protectedvirtual |
Configures and registers the joint state interface in ros_control.
- Parameters
-
[in] robot_state The data field holding the updated robot state.
Definition at line 395 of file franka_hw.cpp.
◆ setupLimitInterface()
|
inlineprotected |
Configures a limit interface to enforce limits on effort, velocity or position level on joint commands.
- Parameters
-
[out] limit_interface The limit interface to set up. [out] command_interface The command interface to hook the limit interface to.
Definition at line 356 of file franka_hw.h.
◆ setupParameterCallbacks()
|
virtual |
Initializes the callbacks for on-the-fly reading the parameters for rate limiting, internal controllers and cutoff frequency.
- Parameters
-
[in] robot_hw_nh A node handle in the namespace of the robot hardware.
Definition at line 552 of file franka_hw.cpp.
◆ update()
|
virtual |
Updates the controller interfaces from the given robot state.
- Parameters
-
[in] robot_state Current robot state.
Definition at line 208 of file franka_hw.cpp.
◆ write()
|
overridevirtual |
Writes data to the franka robot.
- Parameters
-
[in] time The current time. [in] period The time passed since the last call to write.
Reimplemented from hardware_interface::RobotHW.
Reimplemented in franka_hw::FrankaCombinableHW.
Definition at line 385 of file franka_hw.cpp.
Member Data Documentation
◆ arm_id_
|
protected |
Definition at line 528 of file franka_hw.h.
◆ collision_config_
|
protected |
Definition at line 491 of file franka_hw.h.
◆ controller_active_
|
protected |
Definition at line 535 of file franka_hw.h.
◆ current_control_mode_
|
protected |
Definition at line 536 of file franka_hw.h.
◆ effort_joint_command_libfranka_
|
protected |
Definition at line 512 of file franka_hw.h.
◆ effort_joint_command_ros_
|
protected |
Definition at line 519 of file franka_hw.h.
◆ effort_joint_interface_
|
protected |
Definition at line 496 of file franka_hw.h.
◆ effort_joint_limit_interface_
|
protected |
Definition at line 502 of file franka_hw.h.
◆ franka_model_interface_
|
protected |
Definition at line 499 of file franka_hw.h.
◆ franka_pose_cartesian_interface_
|
protected |
Definition at line 497 of file franka_hw.h.
◆ franka_state_interface_
|
protected |
Definition at line 493 of file franka_hw.h.
◆ franka_velocity_cartesian_interface_
|
protected |
Definition at line 498 of file franka_hw.h.
◆ get_cutoff_frequency_
|
protected |
Definition at line 540 of file franka_hw.h.
◆ get_internal_controller_
|
protected |
Definition at line 538 of file franka_hw.h.
◆ get_limit_rate_
|
protected |
Definition at line 539 of file franka_hw.h.
◆ initialized_
|
protected |
Definition at line 534 of file franka_hw.h.
◆ joint_limit_warning_threshold_
|
protected |
Definition at line 531 of file franka_hw.h.
◆ joint_names_
|
protected |
Definition at line 527 of file franka_hw.h.
◆ joint_state_interface_
|
protected |
Definition at line 492 of file franka_hw.h.
◆ libfranka_cmd_mutex_
|
protected |
Definition at line 509 of file franka_hw.h.
◆ libfranka_state_mutex_
|
protected |
Definition at line 504 of file franka_hw.h.
◆ model_
|
protected |
Definition at line 525 of file franka_hw.h.
◆ pose_cartesian_command_libfranka_
|
protected |
Definition at line 513 of file franka_hw.h.
◆ pose_cartesian_command_ros_
|
protected |
Definition at line 520 of file franka_hw.h.
◆ position_joint_command_libfranka_
|
protected |
Definition at line 510 of file franka_hw.h.
◆ position_joint_command_ros_
|
protected |
Definition at line 517 of file franka_hw.h.
◆ position_joint_interface_
|
protected |
Definition at line 494 of file franka_hw.h.
◆ position_joint_limit_interface_
|
protected |
Definition at line 500 of file franka_hw.h.
◆ realtime_config_
|
protected |
Definition at line 532 of file franka_hw.h.
◆ robot_
|
protected |
Definition at line 524 of file franka_hw.h.
◆ robot_ip_
|
protected |
Definition at line 529 of file franka_hw.h.
◆ robot_mutex_
|
protected |
Definition at line 523 of file franka_hw.h.
◆ robot_state_libfranka_
|
protected |
Definition at line 506 of file franka_hw.h.
◆ robot_state_ros_
|
protected |
Definition at line 507 of file franka_hw.h.
◆ ros_cmd_mutex_
|
protected |
Definition at line 516 of file franka_hw.h.
◆ ros_state_mutex_
|
protected |
Definition at line 505 of file franka_hw.h.
◆ run_function_
|
protected |
Definition at line 541 of file franka_hw.h.
◆ urdf_model_
|
protected |
Definition at line 530 of file franka_hw.h.
◆ velocity_cartesian_command_libfranka_
|
protected |
Definition at line 514 of file franka_hw.h.
◆ velocity_cartesian_command_ros_
|
protected |
Definition at line 521 of file franka_hw.h.
◆ velocity_joint_command_libfranka_
|
protected |
Definition at line 511 of file franka_hw.h.
◆ velocity_joint_command_ros_
|
protected |
Definition at line 518 of file franka_hw.h.
◆ velocity_joint_interface_
|
protected |
Definition at line 495 of file franka_hw.h.
◆ velocity_joint_limit_interface_
|
protected |
Definition at line 501 of file franka_hw.h.
The documentation for this class was generated from the following files: