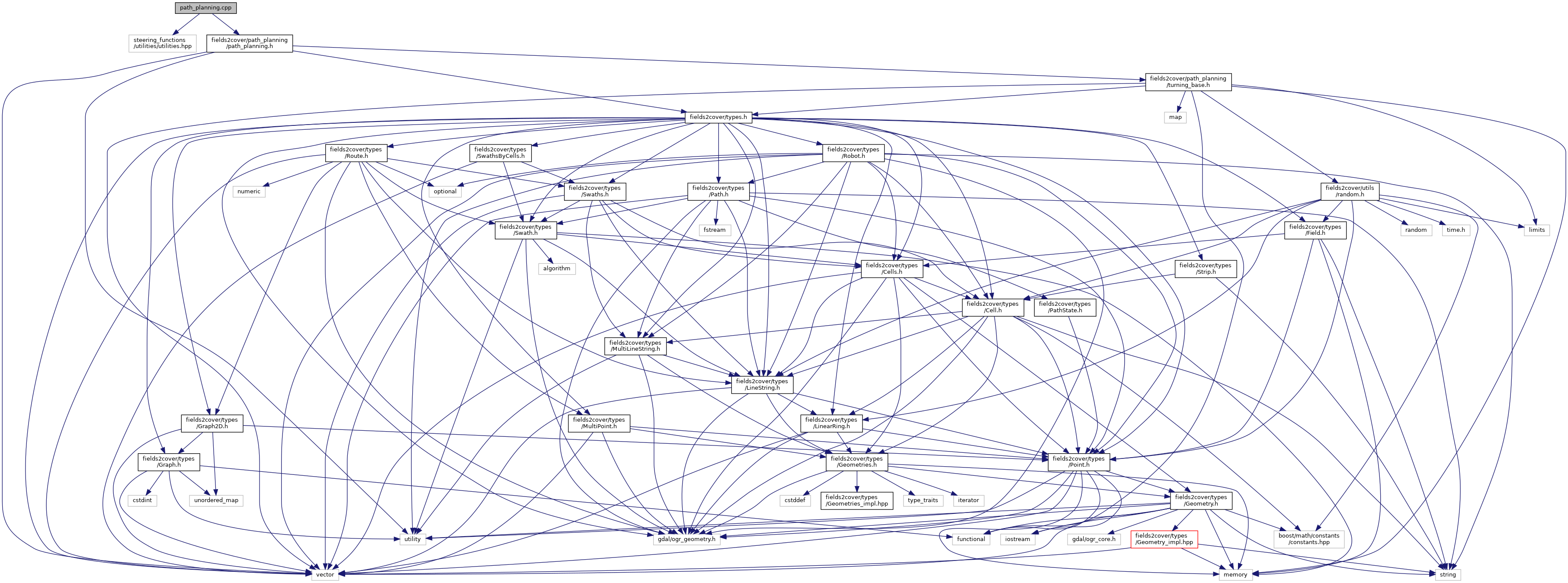
#include <steering_functions/utilities/utilities.hpp>#include "fields2cover/path_planning/path_planning.h"
Include dependency graph for path_planning.cpp:
Go to the source code of this file.
Namespaces | |
| f2c | |
| Main namespace of the fields2cover library. | |
| f2c::pp | |
| Path planning algorithms' namespace. | |