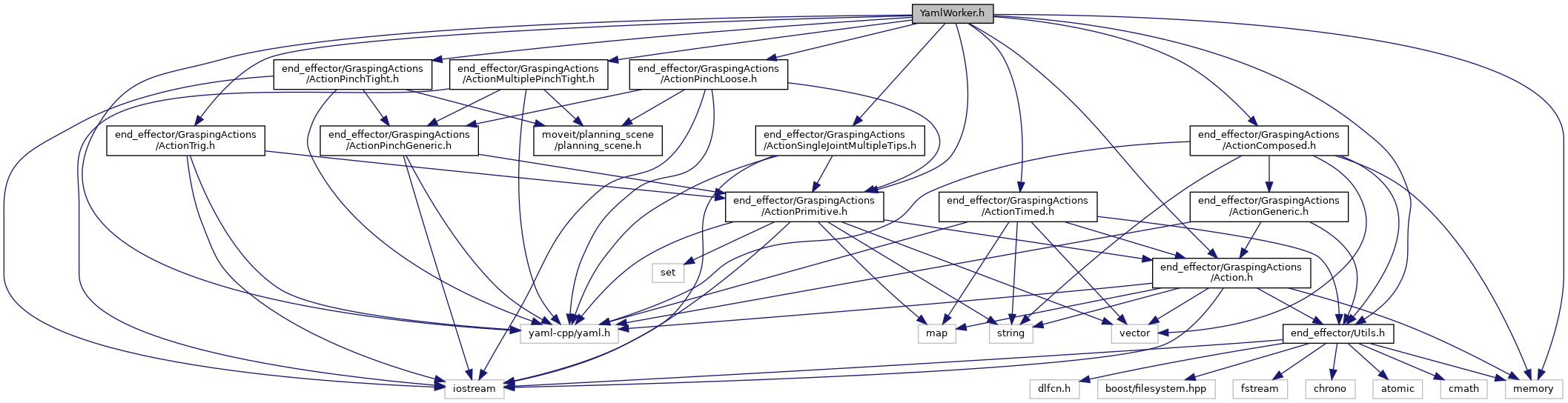
#include <memory>#include <yaml-cpp/yaml.h>#include <end_effector/Utils.h>#include <end_effector/GraspingActions/Action.h>#include <end_effector/GraspingActions/ActionPrimitive.h>#include <end_effector/GraspingActions/ActionPinchTight.h>#include <end_effector/GraspingActions/ActionPinchLoose.h>#include <end_effector/GraspingActions/ActionTrig.h>#include <end_effector/GraspingActions/ActionSingleJointMultipleTips.h>#include <end_effector/GraspingActions/ActionMultiplePinchTight.h>#include <end_effector/GraspingActions/ActionComposed.h>#include <end_effector/GraspingActions/ActionTimed.h>
Include dependency graph for YamlWorker.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ROSEE::YamlWorker |
Namespaces | |
| ROSEE | |
Macros | |
| #define | DEFAULT_ACTION_FOLDER "/configs/actions/" |
Macro Definition Documentation
◆ DEFAULT_ACTION_FOLDER
| #define DEFAULT_ACTION_FOLDER "/configs/actions/" |
Definition at line 20 of file YamlWorker.h.