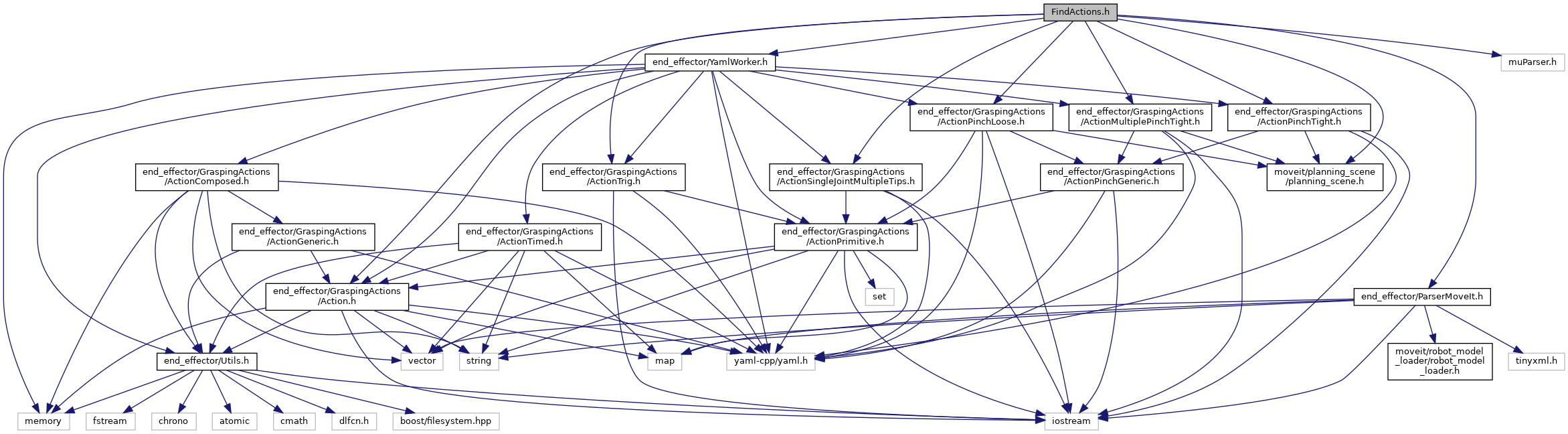
#include <moveit/planning_scene/planning_scene.h>#include <end_effector/YamlWorker.h>#include <end_effector/ParserMoveIt.h>#include <end_effector/GraspingActions/Action.h>#include <end_effector/GraspingActions/ActionPinchTight.h>#include <end_effector/GraspingActions/ActionPinchLoose.h>#include <end_effector/GraspingActions/ActionTrig.h>#include <end_effector/GraspingActions/ActionSingleJointMultipleTips.h>#include <end_effector/GraspingActions/ActionMultiplePinchTight.h>#include <muParser.h>
Include dependency graph for FindActions.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ROSEE::FindActions |
| Class to check which fingertips collide (for the pinch action at the moment) More... | |
Namespaces | |
| ROSEE | |
Macros | |
| #define | DEFAULT_JOINT_POS 0.0 |
| #define | N_EXP_COLLISION 5000 |
| #define | N_EXP_COLLISION_MULTPINCH 3000 |
| #define | N_EXP_DISTANCES 5000 |
Macro Definition Documentation
◆ DEFAULT_JOINT_POS
| #define DEFAULT_JOINT_POS 0.0 |
Definition at line 21 of file FindActions.h.
◆ N_EXP_COLLISION
| #define N_EXP_COLLISION 5000 |
Definition at line 18 of file FindActions.h.
◆ N_EXP_COLLISION_MULTPINCH
| #define N_EXP_COLLISION_MULTPINCH 3000 |
Definition at line 20 of file FindActions.h.
◆ N_EXP_DISTANCES
| #define N_EXP_DISTANCES 5000 |
Definition at line 19 of file FindActions.h.