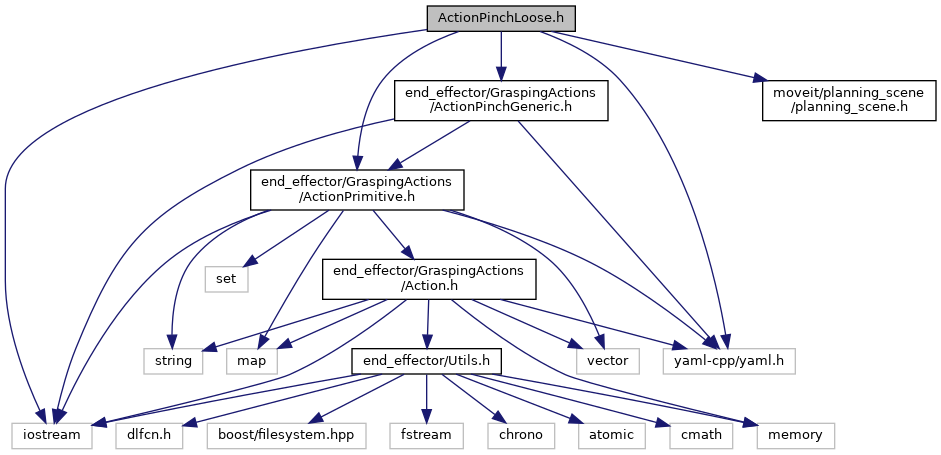
#include <end_effector/GraspingActions/ActionPrimitive.h>#include <end_effector/GraspingActions/ActionPinchGeneric.h>#include <moveit/planning_scene/planning_scene.h>#include <yaml-cpp/yaml.h>#include <iostream>
Include dependency graph for ActionPinchLoose.h:
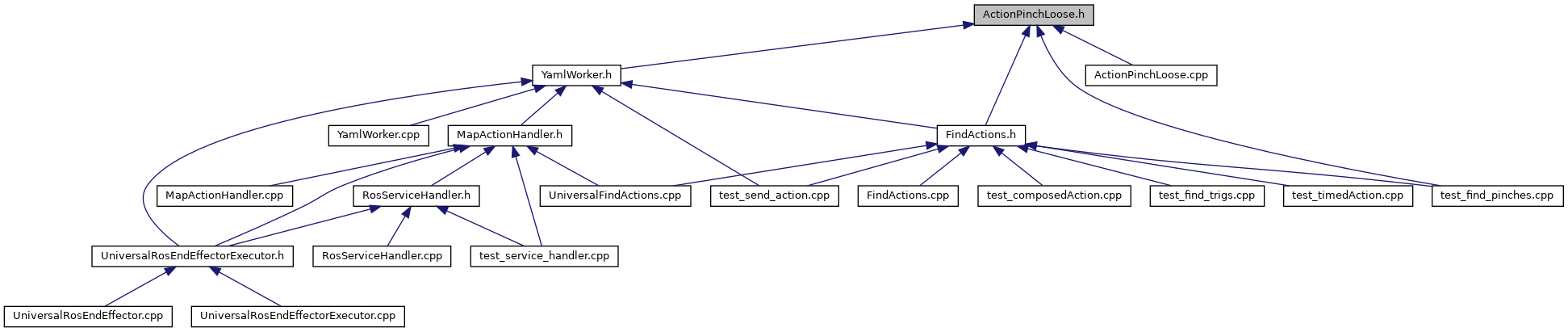
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionPinchLoose |
| The action of pinch with two tips. The two tips must not collide ever (otherwise we have a TightPinch). They only need to move towards each other moving the relative joints. This PinchLoose is created because also if the tips do not collide (i.e. there is not a ActionPinchTight) we can have anyway a pinch at least to take object of a certain minimum size. All the non involved fingers are set in the default state. A pinchLoose is defined by: More... | |
| struct | ROSEE::ActionPinchLoose::distComp |
| struct to put in order the actionStates set. The first elements are the ones with lesser distance More... | |
Namespaces | |
| ROSEE | |