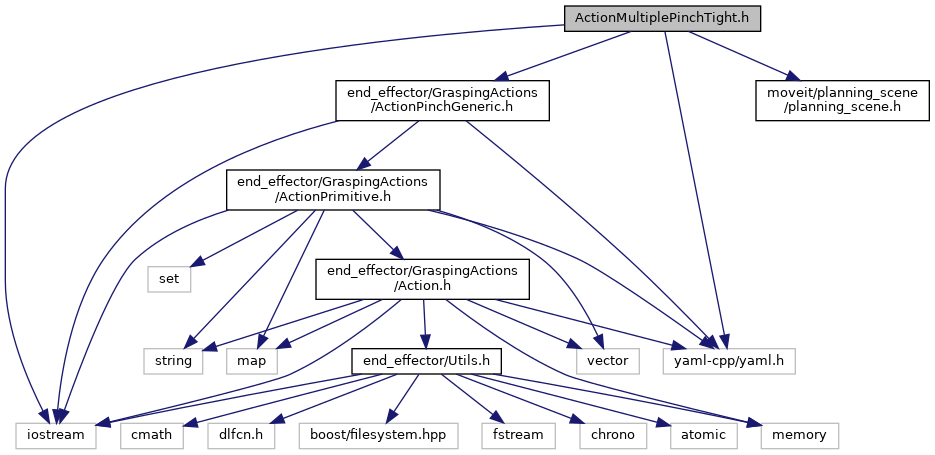
#include <end_effector/GraspingActions/ActionPinchGeneric.h>#include <moveit/planning_scene/planning_scene.h>#include <yaml-cpp/yaml.h>#include <iostream>
Include dependency graph for ActionMultiplePinchTight.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ROSEE::ActionMultiplePinchTight |
| Class to describe the action of "pinching" with more than 2 tips (with 2 tips there is the ActionPinchTight and ActionPinchLoose The number of the finger used is fixed when the object is costructed, and it is stored in the father member nFingersInvolved. More... | |
| struct | ROSEE::ActionMultiplePinchTight::depthComp |
| struct to put in order the actionStates. with "<" we put as best the position that has less sumDepth. More... | |
Namespaces | |
| ROSEE | |