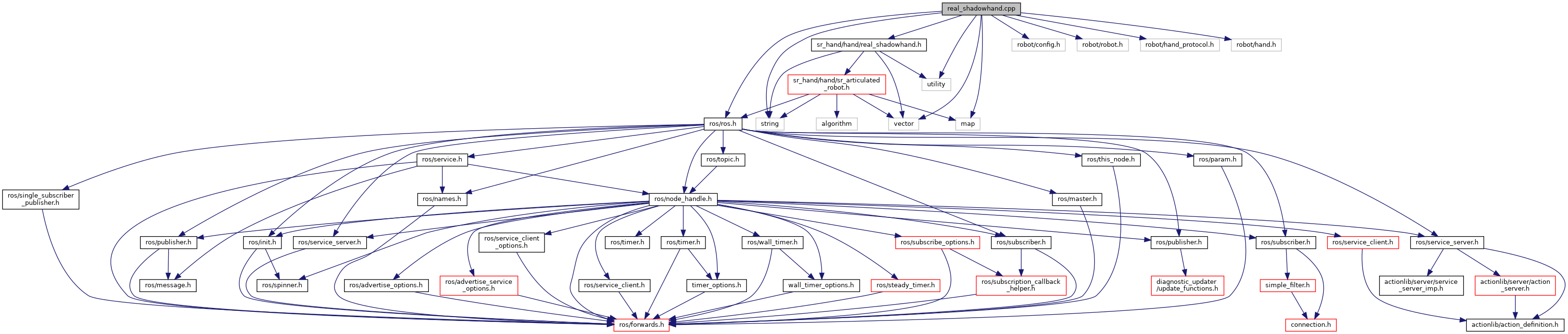
#include <ros/ros.h>#include <utility>#include <string>#include <vector>#include <map>#include "sr_hand/hand/real_shadowhand.h"#include <robot/config.h>#include <robot/robot.h>#include <robot/hand_protocol.h>#include <robot/hand.h>
Include dependency graph for real_shadowhand.cpp:
Go to the source code of this file.
Namespaces | |
| shadowrobot | |
Macros | |
| #define | LAST_HAND_JOINT START_OF_ARM |
Detailed Description
- Date
- Tue May 25 17:50:42 2010
Definition in file real_shadowhand.cpp.
Macro Definition Documentation
◆ LAST_HAND_JOINT
| #define LAST_HAND_JOINT START_OF_ARM |
Definition at line 43 of file real_shadowhand.cpp.