#include <geometry_msgs/Point.h>#include <geometry_msgs/Quaternion.h>#include <sensor_msgs/PointCloud2.h>
Include dependency graph for measurement_reading.h:

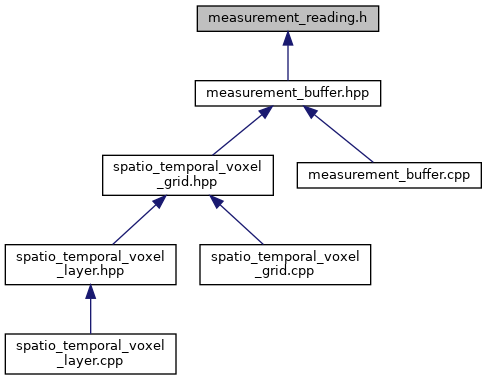
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | observation::MeasurementReading |
Namespaces | |
| observation | |
Enumerations | |
| enum | ModelType { DEPTH_CAMERA = 0, THREE_DIMENSIONAL_LIDAR = 1 } |
Enumeration Type Documentation
◆ ModelType
| enum ModelType |
| Enumerator | |
|---|---|
| DEPTH_CAMERA | |
| THREE_DIMENSIONAL_LIDAR | |
Definition at line 47 of file measurement_reading.h.