This file implements SbgECom commands related to Odometer module. More...
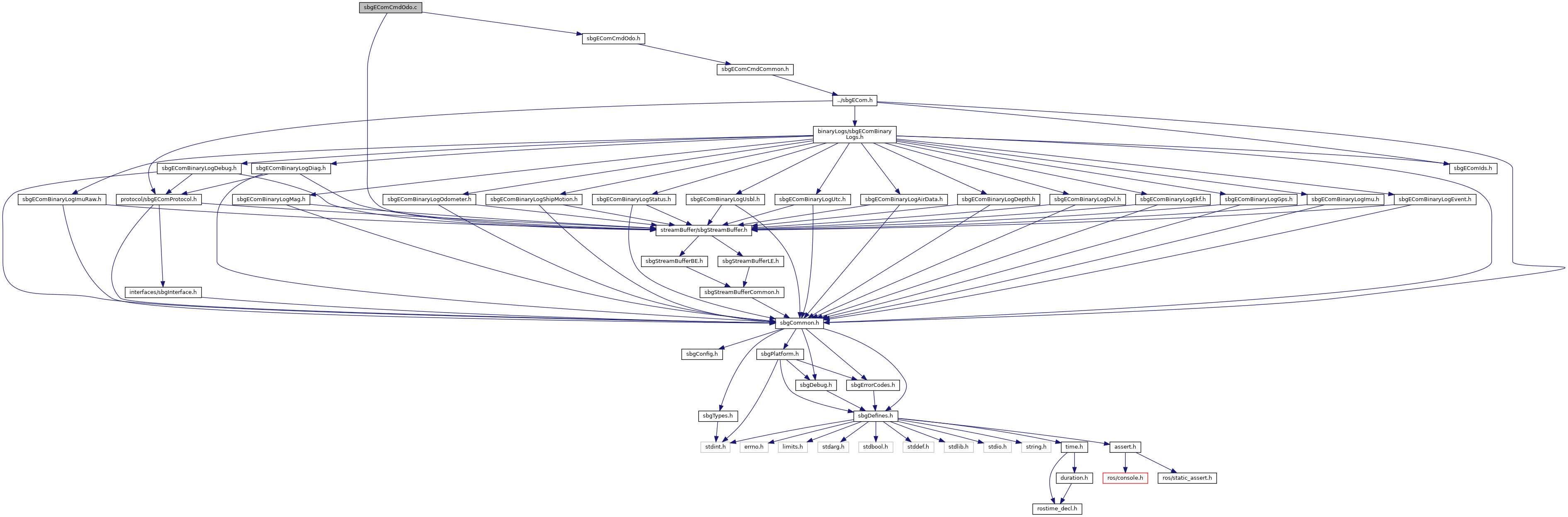
Go to the source code of this file.
Functions | |
| SbgErrorCode | sbgEComCmdOdoCanGetConf (SbgEComHandle *pHandle, SbgEComCmdOdoCanChannel canChannel, SbgEComCmdOdoCanConf *pOdoCanConf) |
| SbgErrorCode | sbgEComCmdOdoCanSetConf (SbgEComHandle *pHandle, SbgEComCmdOdoCanChannel canChannel, const SbgEComCmdOdoCanConf *pOdoCanConf) |
| SbgErrorCode | sbgEComCmdOdoGetConf (SbgEComHandle *pHandle, SbgEComOdoConf *pOdometerConf) |
| SbgErrorCode | sbgEComCmdOdoGetLeverArm (SbgEComHandle *pHandle, float leverArm[3]) |
| SbgErrorCode | sbgEComCmdOdoGetRejection (SbgEComHandle *pHandle, SbgEComOdoRejectionConf *pRejectConf) |
| SbgErrorCode | sbgEComCmdOdoSetConf (SbgEComHandle *pHandle, const SbgEComOdoConf *pOdometerConf) |
| SbgErrorCode | sbgEComCmdOdoSetLeverArm (SbgEComHandle *pHandle, const float leverArm[3]) |
| SbgErrorCode | sbgEComCmdOdoSetRejection (SbgEComHandle *pHandle, const SbgEComOdoRejectionConf *pRejectConf) |
Detailed Description
This file implements SbgECom commands related to Odometer module.
Copyright Notice
Copyright (C) 2007-2019, SBG Systems SAS. All rights reserved.
This source code is intended for use only by SBG Systems SAS and those that have explicit written permission to use it from SBG Systems SAS.
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR PURPOSE.
Definition in file sbgEComCmdOdo.c.
Function Documentation
◆ sbgEComCmdOdoCanGetConf()
| SbgErrorCode sbgEComCmdOdoCanGetConf | ( | SbgEComHandle * | pHandle, |
| SbgEComCmdOdoCanChannel | canChannel, | ||
| SbgEComCmdOdoCanConf * | pOdoCanConf | ||
| ) |
Retrieve the CAN odometer configuration for a specific CAN information channel
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] canChannel The CAN channel to retreive associated DBC configuration. [out] pOdoCanConf Struct to hold configuration of the CAN odometer.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 415 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoCanSetConf()
| SbgErrorCode sbgEComCmdOdoCanSetConf | ( | SbgEComHandle * | pHandle, |
| SbgEComCmdOdoCanChannel | canChannel, | ||
| const SbgEComCmdOdoCanConf * | pOdoCanConf | ||
| ) |
Set the CAN odometer configuration for a specific CAN information channel
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] canChannel The CAN channel to define associated DBC configuration. [in] pOdoCanConf Struct holding configuration for the CAN odometer.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 499 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoGetConf()
| SbgErrorCode sbgEComCmdOdoGetConf | ( | SbgEComHandle * | pHandle, |
| SbgEComOdoConf * | pOdometerConf | ||
| ) |
For quadrature and/or pulse based odometer, retrieve the configuration.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pOdometerConf Pointer to a SbgEComOdoConf struct to hold configuration of the odometer module.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 26 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoGetLeverArm()
| SbgErrorCode sbgEComCmdOdoGetLeverArm | ( | SbgEComHandle * | pHandle, |
| float | leverArm[3] | ||
| ) |
Retrieve the lever arm applicable for both quadrature or CAN based odometer.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] leverArm Array of three values, one for each axis.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 157 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoGetRejection()
| SbgErrorCode sbgEComCmdOdoGetRejection | ( | SbgEComHandle * | pHandle, |
| SbgEComOdoRejectionConf * | pRejectConf | ||
| ) |
Retrieve the velocity rejection configuration for both quadrature or CAN based odometer.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pRejectConf Pointer to a SbgEComOdoRejectionConf struct to hold rejection configuration of the odometer module.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 288 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoSetConf()
| SbgErrorCode sbgEComCmdOdoSetConf | ( | SbgEComHandle * | pHandle, |
| const SbgEComOdoConf * | pOdometerConf | ||
| ) |
For quadrature and/or pulse base odometer, define the configuration.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pOdometerConf Pointer to a SbgEComOdoConf struct holding configuration for the odometer module.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 92 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoSetLeverArm()
| SbgErrorCode sbgEComCmdOdoSetLeverArm | ( | SbgEComHandle * | pHandle, |
| const float | leverArm[3] | ||
| ) |
Set the lever arm applicable for both quadrature or CAN based odometer.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] leverArm Array of three values, one for each axis.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 223 of file sbgEComCmdOdo.c.
◆ sbgEComCmdOdoSetRejection()
| SbgErrorCode sbgEComCmdOdoSetRejection | ( | SbgEComHandle * | pHandle, |
| const SbgEComOdoRejectionConf * | pRejectConf | ||
| ) |
Set the velocity rejection configuration for both quadrature or CAN based odometer.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pRejectConf Pointer to a SbgEComOdoRejectionConf struct holding rejection configuration for the odometer module.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 352 of file sbgEComCmdOdo.c.