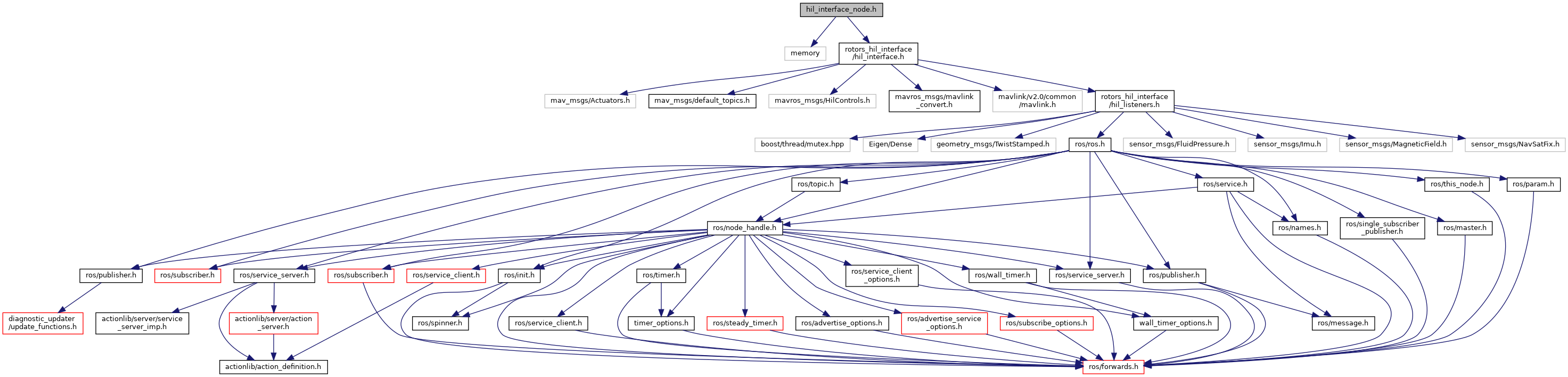
Include dependency graph for hil_interface_node.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rotors_hil::HilInterfaceNode |
Namespaces | |
| rotors_hil | |
Variables | |
| static constexpr double | rotors_hil::kDefaultBodyToSensorsPitch = 0.0 |
| static constexpr double | rotors_hil::kDefaultBodyToSensorsRoll = M_PI |
| static constexpr double | rotors_hil::kDefaultBodyToSensorsYaw = 0.0 |
| static const std::string | rotors_hil::kDefaultHilControlsSubTopic = "mavros/hil_controls/hil_controls" |
| static constexpr double | rotors_hil::kDefaultHilFrequency = 100.0 |
| static const std::string | rotors_hil::kDefaultMavlinkPubTopic = "mavlink/to" |
| static constexpr bool | rotors_hil::kDefaultSensorLevelHil = true |