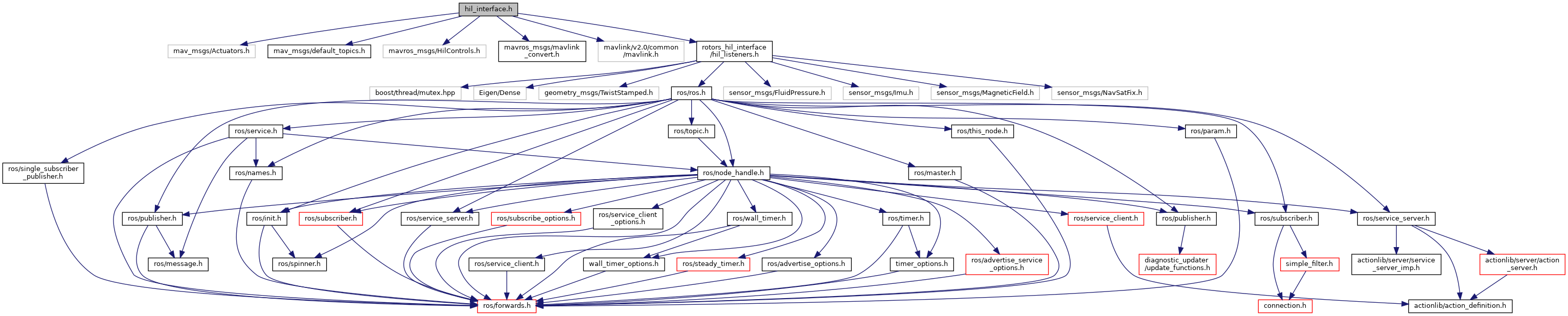
#include <mav_msgs/Actuators.h>#include <mav_msgs/default_topics.h>#include <mavros_msgs/HilControls.h>#include <mavros_msgs/mavlink_convert.h>#include <mavlink/v2.0/common/mavlink.h>#include <rotors_hil_interface/hil_listeners.h>
Include dependency graph for hil_interface.h:
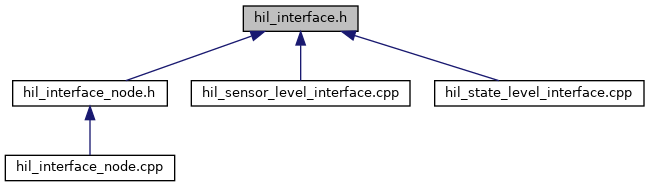
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rotors_hil::HilInterface |
| class | rotors_hil::HilSensorLevelInterface |
| class | rotors_hil::HilStateLevelInterface |
Namespaces | |
| rotors_hil | |
Typedefs | |
| typedef mavlink::mavlink_message_t | mavlink_message_t |
Functions | |
| u_int64_t | rotors_hil::RosTimeToMicroseconds (const ros::Time &rostime) |
| Convert ros::Time into single value in microseconds. More... | |
Variables | |
| static constexpr int | rotors_hil::kAllFieldsUpdated = 4095 |
| static constexpr double | rotors_hil::kDefaultGpsFrequency = 5.0 |
| static const std::string | rotors_hil::kDefaultPressureSubTopic = "air_pressure" |
Typedef Documentation
◆ mavlink_message_t
| typedef mavlink::mavlink_message_t mavlink_message_t |
Definition at line 26 of file hil_interface.h.