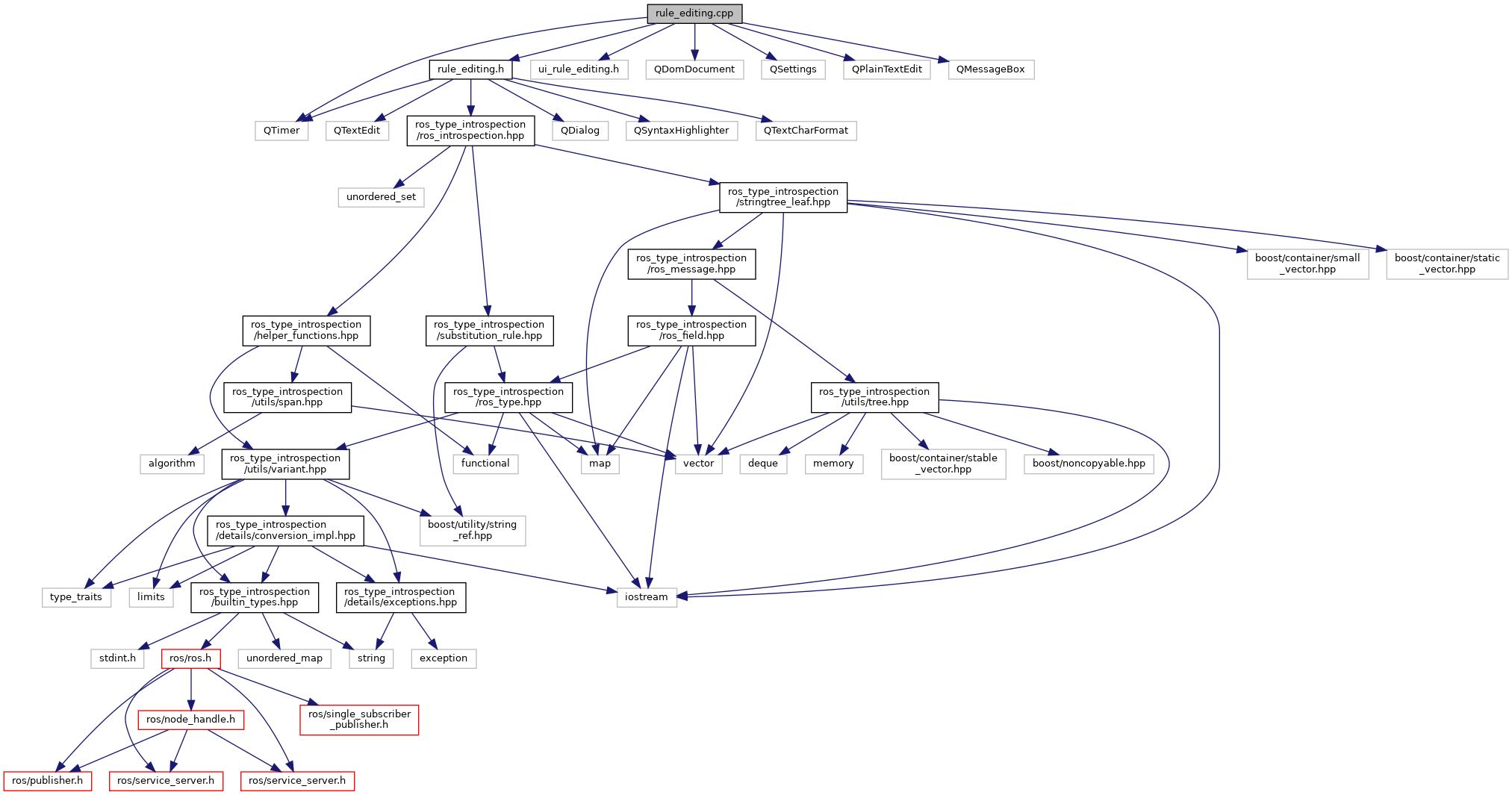
#include "rule_editing.h"#include "ui_rule_editing.h"#include <QDomDocument>#include <QSettings>#include <QPlainTextEdit>#include <QTimer>#include <QMessageBox>
Include dependency graph for rule_editing.cpp:
Go to the source code of this file.
Variables | |
| const char * | DEFAULT_RULES |
Variable Documentation
◆ DEFAULT_RULES
| const char* DEFAULT_RULES |
Initial value:
= "<SubstitutionRules>\n"
"\n"
"<RosType name=\"sensor_msgs/JointState\">\n"
" <rule pattern=\"position.#\" alias=\"name.#\" substitution=\"@/pos\" />\n"
" <rule pattern=\"velocity.#\" alias=\"name.#\" substitution=\"@/vel\" />\n"
" <rule pattern=\"effort.#\" alias=\"name.#\" substitution=\"@/eff\" />\n"
"</RosType>\n"
"\n"
"<RosType name=\"tf/tfMessage\">"
" <rule pattern=\"transforms.#/header\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/header\" />\n"
" <rule pattern=\"transforms.#/transform/rotation\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/rotation\" />\n"
" <rule pattern=\"transforms.#/transform/translation\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/translation\" />\n"
"</RosType>\n"
"\n"
"<RosType name=\"tf2_msgs/TFMessage\">"
" <rule pattern=\"transforms.#/header\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/header\" />\n"
" <rule pattern=\"transforms.#/transform/rotation\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/rotation\" />\n"
" <rule pattern=\"transforms.#/transform/translation\" "
"alias=\"transforms.#/child_frame_id\" substitution=\"@/translation\" />\n"
"</RosType>\n"
"\n"
"<RosType name=\"pal_statistics_msgs/Statistics\">\n"
" <rule pattern=\"statistics.#/value\" alias=\"statistics.#/name\" substitution=\"@\" />\n"
"</RosType>\n"
"</SubstitutionRules>\n"
Definition at line 9 of file rule_editing.cpp.