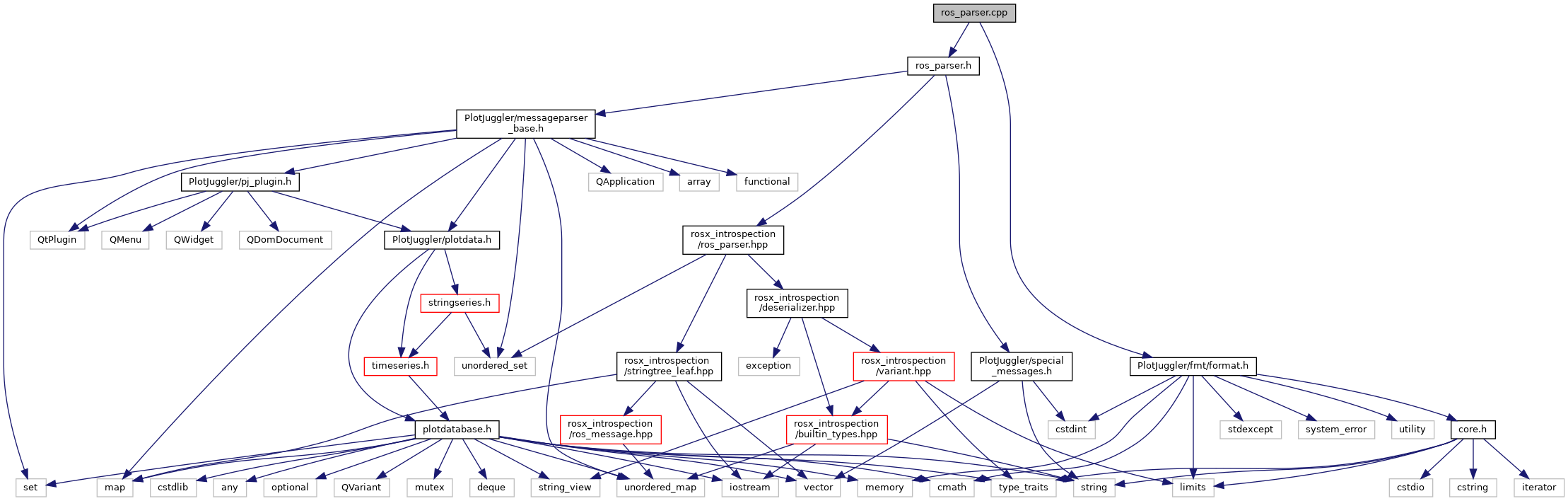
Include dependency graph for ros_parser.cpp:
Go to the source code of this file.
Variables | |
| static ROSType | quaternion_type (Msg::Quaternion::id()) |
| constexpr double | RAD_TO_DEG = 180.0 / M_PI |
Variable Documentation
◆ quaternion_type
|
static |
◆ RAD_TO_DEG
| constexpr double RAD_TO_DEG = 180.0 / M_PI |
Definition at line 8 of file ros_parser.cpp.