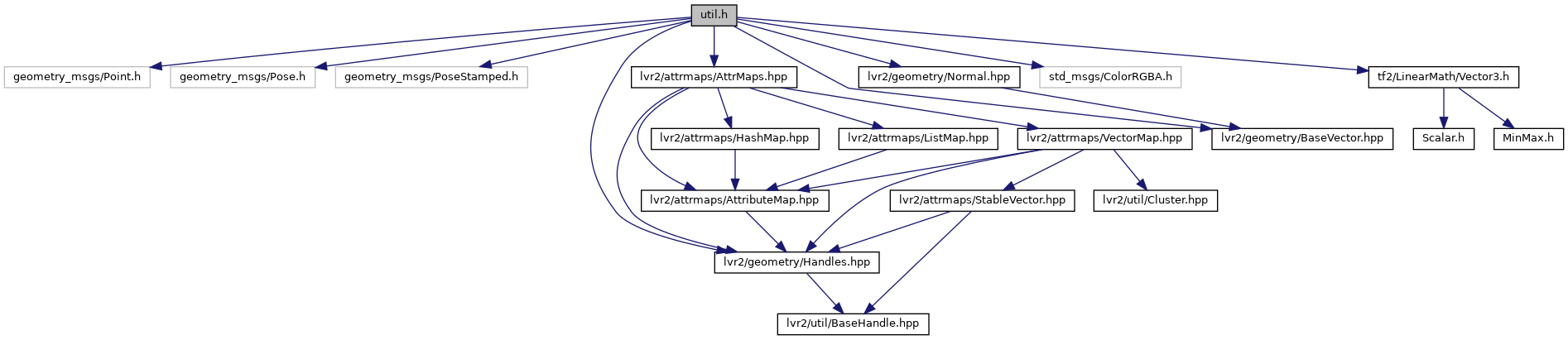
#include <geometry_msgs/Point.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <lvr2/geometry/Handles.hpp>#include <lvr2/attrmaps/AttrMaps.hpp>#include <lvr2/geometry/BaseVector.hpp>#include <lvr2/geometry/Normal.hpp>#include <std_msgs/ColorRGBA.h>#include <tf2/LinearMath/Vector3.h>
Include dependency graph for util.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mesh_map | |
Functions | |
| bool | mesh_map::barycentricCoords (const Vector &p, const Vector &v0, const Vector &v1, const Vector &v2, float &u, float &v, float &w) |
| Computes the barycentric coordinates u, v,q of a query point p onto the triangle v0, v1, v2. More... | |
| geometry_msgs::Pose | mesh_map::calculatePoseFromDirection (const Vector &position, const Vector &direction, const Normal &normal) |
| geometry_msgs::Pose | mesh_map::calculatePoseFromPosition (const Vector ¤t, const Vector &next, const Normal &normal) |
| Calculates a geometry_msgs/Pose message from two positions and a normal vector. More... | |
| geometry_msgs::Pose | mesh_map::calculatePoseFromPosition (const Vector ¤t, const Vector &next, const Normal &normal, float &cost) |
| Calculates a geometry_msgs/Pose message from two positions and a normal vector. More... | |
| std_msgs::ColorRGBA | mesh_map::color (const float &r, const float &g, const float &b, const float &a=1.0) |
| Function to build std_msgs color instances. More... | |
| void | mesh_map::getMinMax (const lvr2::VertexMap< float > &map, float &min, float &max) |
| Function to compute the minimum and maximum of a cost layer. More... | |
| std_msgs::ColorRGBA | mesh_map::getRainbowColor (const float value) |
| map value to color on color rainbow More... | |
| void | mesh_map::getRainbowColor (float value, float &r, float &g, float &b) |
| map value to color on color rainbow More... | |
| bool | mesh_map::inTriangle (const Vector &p, const Vector &v0, const Vector &v1, const Vector &v2, const float &max_dist, const float &epsilon) |
| Computes whether a points lies inside or outside a triangle with respect to a maximum distance while using an epsilon. More... | |
| template<typename T > | |
| T | mesh_map::linearCombineBarycentricCoords (const std::array< T, 3 > &vertex_properties, const std::array< float, 3 > &barycentric_coords) |
| Computes a linear combination of vertex properties and the barycentric coordinates. More... | |
| template<typename T > | |
| T | mesh_map::linearCombineBarycentricCoords (const std::array< lvr2::VertexHandle, 3 > &vertices, const lvr2::VertexMap< T > &attribute_map, const std::array< float, 3 > &barycentric_coords) |
| Computes a linear combination of vertex properties and the barycentric coordinates. More... | |
| mesh_map::Normal | mesh_map::poseToDirectionVector (const geometry_msgs::PoseStamped &pose, const tf2::Vector3 &axis=tf2::Vector3(1, 0, 0)) |
| mesh_map::Vector | mesh_map::poseToPositionVector (const geometry_msgs::PoseStamped &pose) |
| bool | mesh_map::projectedBarycentricCoords (const Vector &p, const std::array< Vector, 3 > &vertices, std::array< float, 3 > &barycentric_coords, float &dist) |
| Computes projected barycentric coordinates and whether the query point lies inside or outside the given triangle. More... | |
| Vector | mesh_map::projectVectorOntoPlane (const Vector &vec, const Vector &ref, const Normal &normal) |
| Projects a vector / point onto a plane, which is defined by the reference vector and the normal vector. More... | |
| Vector | mesh_map::toVector (const geometry_msgs::Point &point) |
| Converts a ROS geometry_msgs/Point message to a lvr2 vector. More... | |