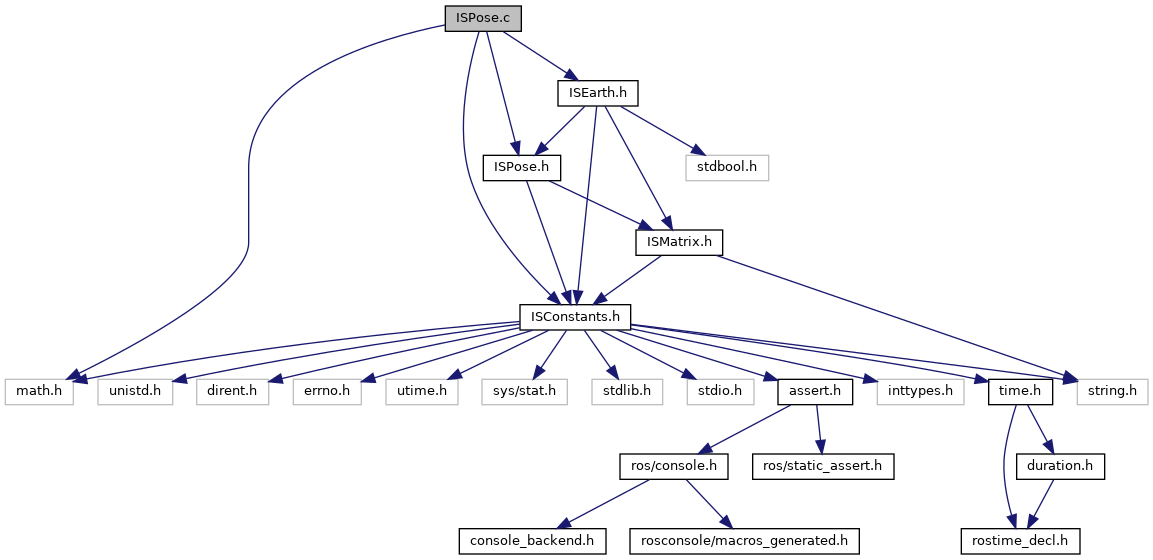
Include dependency graph for ISPose.c:
Go to the source code of this file.
Macros | |
| #define | _MATH_DEFINES_DEFINED |
Functions | |
| void | DCMeuler (const Matrix3_t m, Euler_t euler) |
| f_t | DCMpsi (const f_t *m) |
| void | DCMquat (const Matrix3_t mat, Quat_t q) |
| void | div_Quat_Quat (Quat_t result, const Quat_t q1, const Quat_t q2) |
| void | dpsi_dq (const Quat_t q, Quat_t dq) |
| void | euler2quat (const Euler_t euler, Quat_t q) |
| void | eulerBodyToReference (const Euler_t e, const Euler_t rot, Euler_t result) |
| void | eulerDCM (const Euler_t euler, Matrix3_t m) |
| void | eulerDCM_Trans (const Euler_t euler, Matrix3_t m) |
| void | eulerNed (const Euler_t e, Vector3_t ned) |
| void | eulerReferenceToBody (const Euler_t e, const Euler_t rot, Euler_t result) |
| void | eulerWx (const Euler_t euler, Matrix3_t mat) |
| void | mul_ConjQuat_Quat (Quat_t result, const Quat_t qc, const Quat_t q2) |
| void | mul_Quat_ConjQuat (Quat_t result, const Quat_t q1, const Quat_t qc) |
| void | mul_Quat_Quat (Quat_t result, const Quat_t q1, const Quat_t q2) |
| void | nedEuler (const Vector3_t ned, Euler_t e) |
| void | phiThetaDCM (const Euler_t euler, Matrix3_t m) |
| void | psiDCM (const f_t psi, Matrix2_t m) |
| void | qe2b2EulerNedEcef (Vector3 eul, const Vector4 qe2b, const Vector3d ecef) |
| void | qe2b2EulerNedLLA (Vector3 eul, const Vector4 qe2b, const Vector3d lla) |
| void | quat2euler (const Quat_t q, Euler_t theta) |
| void | quat2phiTheta (const Quat_t q, f_t *phi, f_t *theta) |
| void | quat2psi (const Quat_t q, f_t *psi) |
| void | quat_ecef2ned (float lat, float lon, float *qe2n) |
| void | quat_init (Quat_t q) |
| void | quat_Vec3_Vec3 (Quat_t result, const Vector3_t v1, const Vector3_t v2) |
| void | quatConj (Quat_t result, const Quat_t q) |
| void | quatConjRot (Vector3_t result, const Quat_t q, const Vector3_t v) |
| void | quatDCM (const Quat_t q, Matrix3_t mat) |
| void | quatdDCM (const Vector4d q, Matrix3_t mat) |
| void | quatRot (Vector3_t result, const Quat_t q, const Vector3_t v) |
| void | quatRotAxis (const Quat_t q, Vector3_t pqr) |
| void | quatW (const Euler_t euler, Matrix4_t mat) |
| void | vectorBodyToReference (const Vector3_t v, const Euler_t rot, Vector3_t result) |
| void | vectorReferenceToBody (const Vector3_t v, const Euler_t rot, Vector3_t result) |