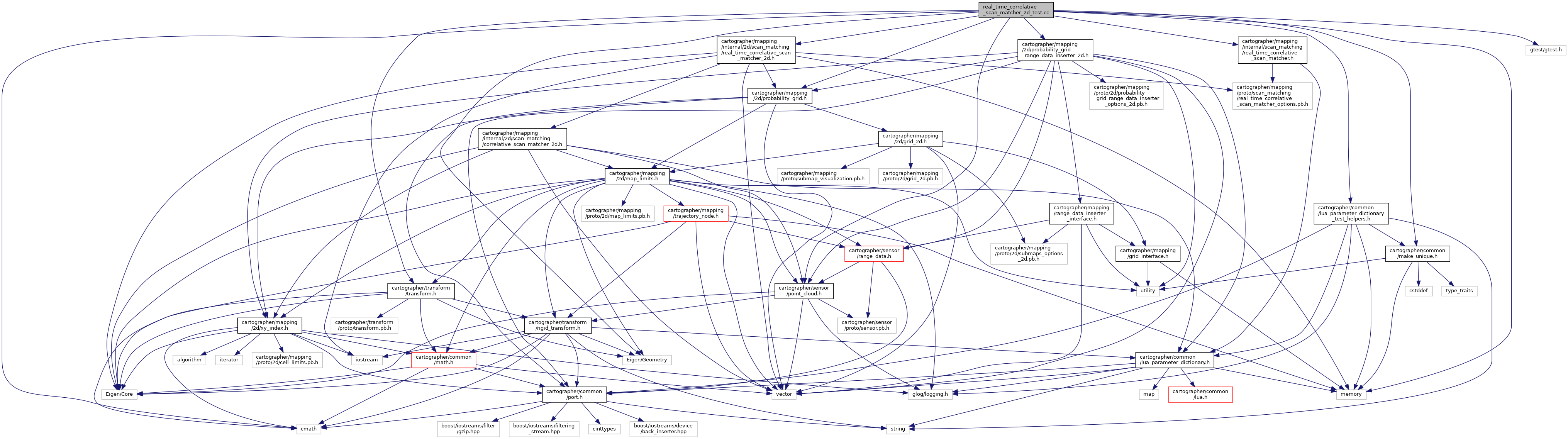
#include "cartographer/mapping/internal/2d/scan_matching/real_time_correlative_scan_matcher_2d.h"#include <cmath>#include <memory>#include "Eigen/Geometry"#include "cartographer/common/lua_parameter_dictionary_test_helpers.h"#include "cartographer/common/make_unique.h"#include "cartographer/mapping/2d/probability_grid.h"#include "cartographer/mapping/2d/probability_grid_range_data_inserter_2d.h"#include "cartographer/mapping/internal/scan_matching/real_time_correlative_scan_matcher.h"#include "cartographer/sensor/point_cloud.h"#include "cartographer/transform/transform.h"#include "gtest/gtest.h"
Include dependency graph for real_time_correlative_scan_matcher_2d_test.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping | |
| cartographer::mapping::scan_matching | |
Variable Documentation
◆ point_cloud_
|
protected |
Definition at line 82 of file real_time_correlative_scan_matcher_2d_test.cc.
◆ probability_grid_
|
protected |
Definition at line 80 of file real_time_correlative_scan_matcher_2d_test.cc.
◆ range_data_inserter_
|
protected |
Definition at line 81 of file real_time_correlative_scan_matcher_2d_test.cc.
◆ real_time_correlative_scan_matcher_
|
protected |
Definition at line 84 of file real_time_correlative_scan_matcher_2d_test.cc.