Include dependency graph for shapes.h:

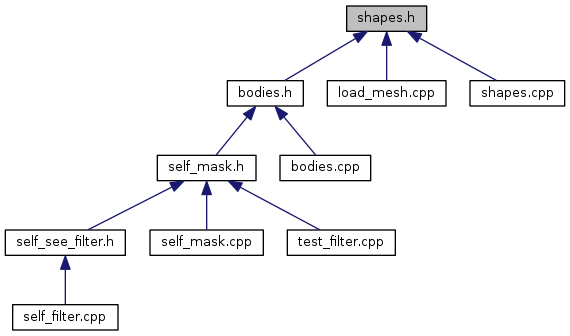
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_self_filter::shapes::Box |
| Definition of a box. More... | |
| class | robot_self_filter::shapes::Cylinder |
| Definition of a cylinder. More... | |
| class | robot_self_filter::shapes::Mesh |
| Definition of a mesh. More... | |
| class | robot_self_filter::shapes::Plane |
| Definition of a plane with equation ax + by + cz + d = 0. More... | |
| class | robot_self_filter::shapes::Shape |
| A basic definition of a shape. Shapes are considered centered at origin. More... | |
| class | robot_self_filter::shapes::Sphere |
| Definition of a sphere. More... | |
| class | robot_self_filter::shapes::StaticShape |
| A basic definition of a static shape. Static shapes do not have a pose. More... | |
Namespaces | |
| robot_self_filter | |
| robot_self_filter::shapes | |
Functions | |
| Shape * | robot_self_filter::shapes::cloneShape (const Shape *shape) |
| Create a copy of a shape. More... | |
| StaticShape * | robot_self_filter::shapes::cloneShape (const StaticShape *shape) |
| Create a copy of a static shape. More... | |
| Mesh * | robot_self_filter::shapes::createMeshFromBinaryDAE (const char *filename) |
| Load a mesh from a binary DAE file. Normals are recomputed and repeating vertices are identified. More... | |
| Mesh * | robot_self_filter::shapes::createMeshFromBinaryStl (const char *filename) |
| Load a mesh from a binary STL file. Normals are recomputed and repeating vertices are identified. More... | |
| Mesh * | robot_self_filter::shapes::createMeshFromBinaryStlData (const char *data, unsigned int size) |
| Load a mesh from a binary STL stream. Normals are recomputed and repeating vertices are identified. More... | |
| Mesh * | robot_self_filter::shapes::createMeshFromVertices (const std::vector< tf::Vector3 > &vertices, const std::vector< unsigned int > &triangles) |
| Load a mesh from a set of vertices. Triangles are constructed using index values from the triangles vector. Triangle k has vertices at index values triangles[3k], triangles[3k+1], triangles[3k+2]. More... | |
| Mesh * | robot_self_filter::shapes::createMeshFromVertices (const std::vector< tf::Vector3 > &source) |
| Load a mesh from a set of vertices. Every 3 vertices are considered a triangle. Repeating vertices are identified and the set of triangle indices is constructed. The normal at each triangle is also computed. More... | |