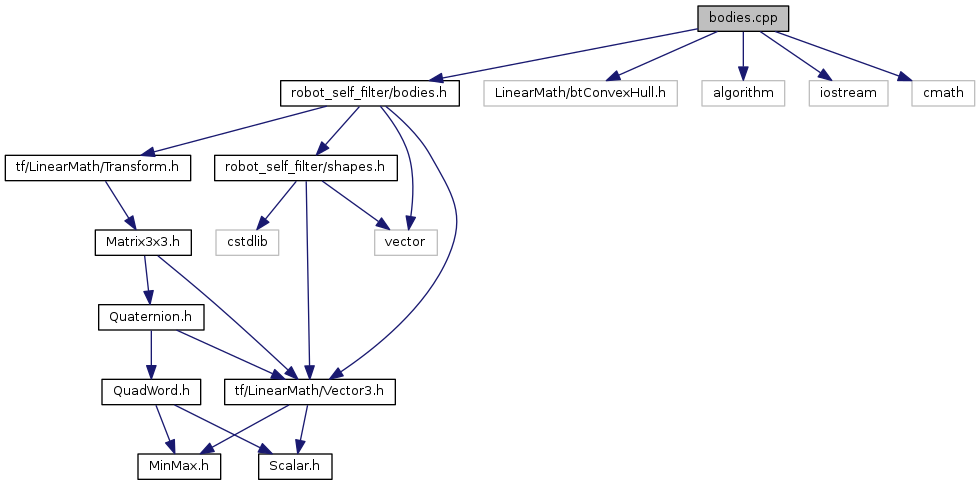
#include "robot_self_filter/bodies.h"#include <LinearMath/btConvexHull.h>#include <algorithm>#include <iostream>#include <cmath>
Include dependency graph for bodies.cpp:
Go to the source code of this file.
Classes | |
| struct | robot_self_filter::bodies::detail::intersc |
| struct | robot_self_filter::bodies::detail::interscOrder |
Namespaces | |
| robot_self_filter | |
| robot_self_filter::bodies | |
| robot_self_filter::bodies::detail | |
Functions | |
| static double | robot_self_filter::bodies::distanceSQR (const tf::Vector3 &p, const tf::Vector3 &origin, const tf::Vector3 &dir) |
| Compute the square of the distance between a ray and a point Note: this requires 'dir' to be normalized. More... | |
Variables | |
| static const double | robot_self_filter::bodies::ZERO = 1e-9 |