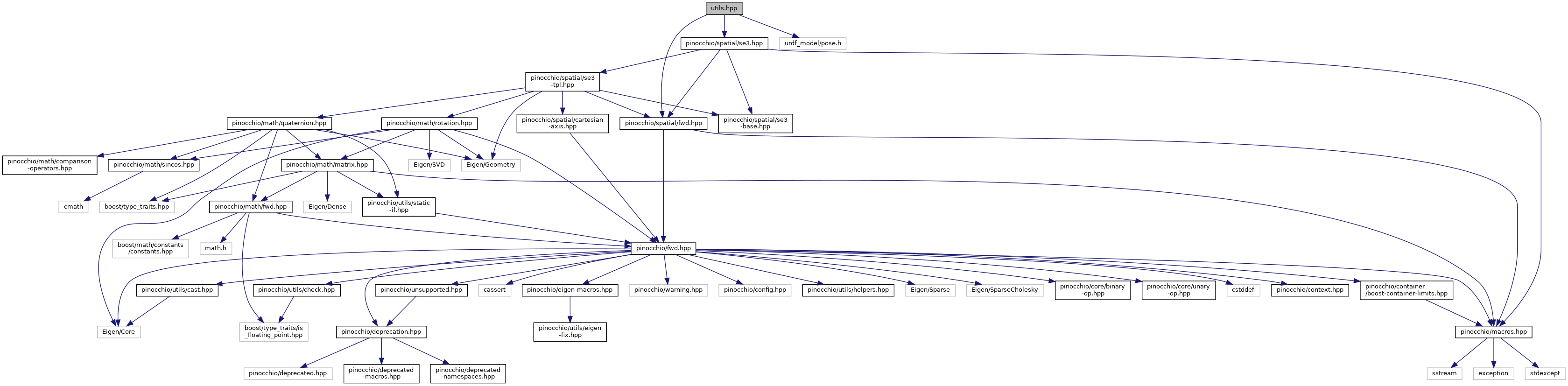
#include "pinocchio/spatial/fwd.hpp"#include "pinocchio/spatial/se3.hpp"#include <urdf_model/pose.h>
Include dependency graph for urdf/utils.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::urdf | |
| URDF parsing. | |
| pinocchio::urdf::details | |
Functions | |
| SE3 | pinocchio::urdf::details::convertFromUrdf (const ::urdf::Pose &M) |
| Convert URDF Pose quantity to SE3. More... | |