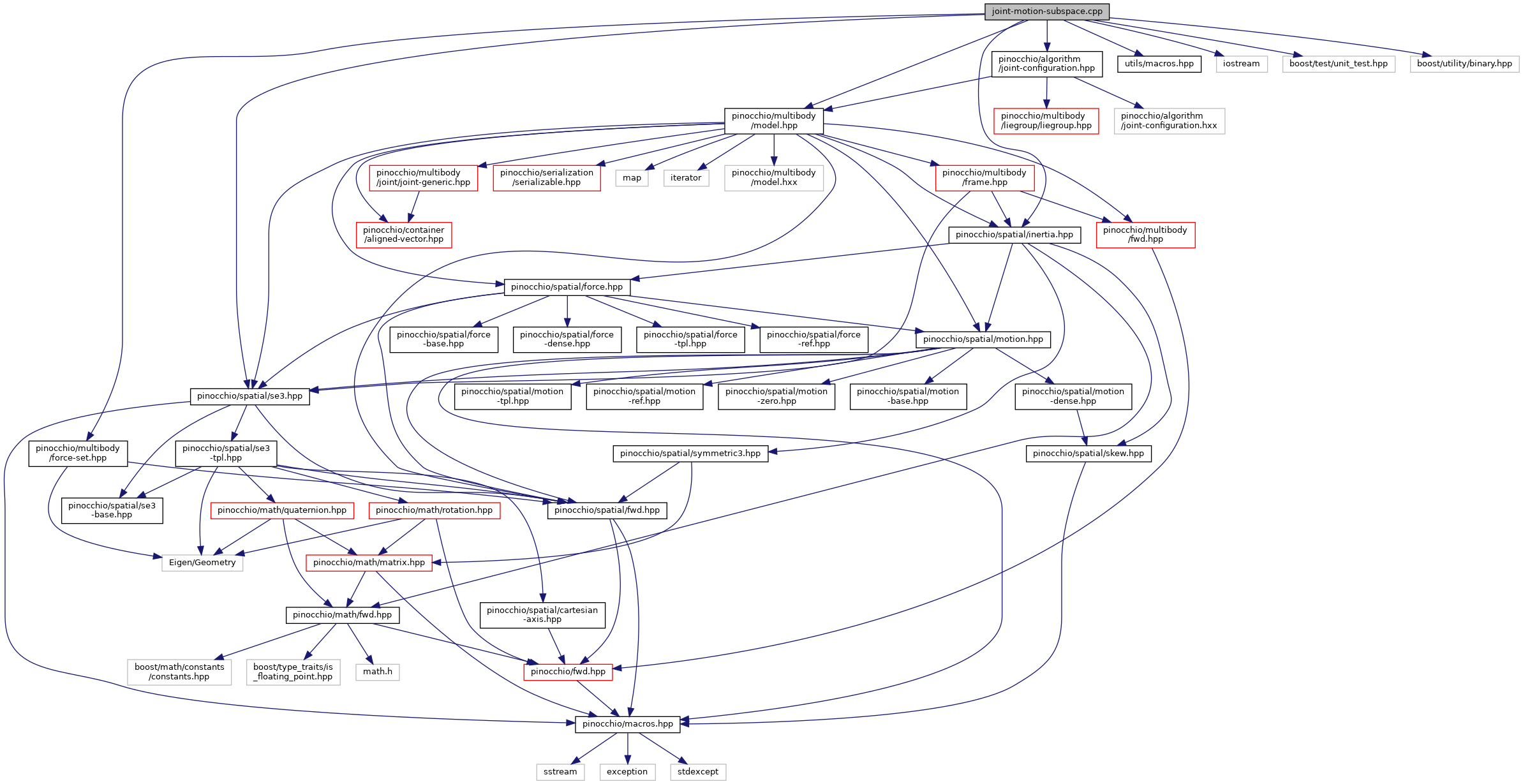
#include "pinocchio/spatial/se3.hpp"#include "pinocchio/spatial/inertia.hpp"#include "pinocchio/multibody/force-set.hpp"#include "pinocchio/multibody/model.hpp"#include "pinocchio/algorithm/joint-configuration.hpp"#include "utils/macros.hpp"#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>
Include dependency graph for joint-motion-subspace.cpp:
Go to the source code of this file.
Functions | |
| BOOST_AUTO_TEST_CASE (test_ConstraintRX) | |
| BOOST_AUTO_TEST_CASE (test_ForceSet) | |
| BOOST_AUTO_TEST_CASE (test_joint_constraint_operations) | |
| template<typename JointModel > | |
| void | test_constraint_operations (const JointModelBase< JointModel > &jmodel) |
| template<typename Scalar , int Options, template< typename, int > class JointCollection> | |
| void | test_constraint_operations (const JointModelMimicTpl< Scalar, Options, JointCollection > &) |
| template<typename JointModel > | |
| void | test_jmodel_nq_against_nq_ref (const JointModelBase< JointModel > &jmodel, const int &nq_ref) |
| template<typename Scalar , int Options, template< typename, int > class JointCollection> | |
| void | test_jmodel_nq_against_nq_ref (const JointModelMimicTpl< Scalar, Options, JointCollection > &jmodel, const int &nq_ref) |
| template<typename JointModel , typename ConstraintDerived > | |
| void | test_nv_against_jmodel (const JointModelBase< JointModel > &jmodel, const JointMotionSubspaceBase< ConstraintDerived > &constraint) |
| template<typename Scalar , int Options, template< typename, int > class JointCollection, typename ConstraintDerived > | |
| void | test_nv_against_jmodel (const JointModelMimicTpl< Scalar, Options, JointCollection > &jmodel, const JointMotionSubspaceBase< ConstraintDerived > &constraint) |
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/3]
| BOOST_AUTO_TEST_CASE | ( | test_ConstraintRX | ) |
Definition at line 56 of file joint-motion-subspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/3]
| BOOST_AUTO_TEST_CASE | ( | test_ForceSet | ) |
Definition at line 22 of file joint-motion-subspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [3/3]
| BOOST_AUTO_TEST_CASE | ( | test_joint_constraint_operations | ) |
Definition at line 432 of file joint-motion-subspace.cpp.
◆ test_constraint_operations() [1/2]
template<typename JointModel >
| void test_constraint_operations | ( | const JointModelBase< JointModel > & | jmodel | ) |
Definition at line 118 of file joint-motion-subspace.cpp.
◆ test_constraint_operations() [2/2]
template<typename Scalar , int Options, template< typename, int > class JointCollection>
| void test_constraint_operations | ( | const JointModelMimicTpl< Scalar, Options, JointCollection > & | ) |
Definition at line 262 of file joint-motion-subspace.cpp.
◆ test_jmodel_nq_against_nq_ref() [1/2]
template<typename JointModel >
| void test_jmodel_nq_against_nq_ref | ( | const JointModelBase< JointModel > & | jmodel, |
| const int & | nq_ref | ||
| ) |
Definition at line 73 of file joint-motion-subspace.cpp.
◆ test_jmodel_nq_against_nq_ref() [2/2]
template<typename Scalar , int Options, template< typename, int > class JointCollection>
| void test_jmodel_nq_against_nq_ref | ( | const JointModelMimicTpl< Scalar, Options, JointCollection > & | jmodel, |
| const int & | nq_ref | ||
| ) |
Definition at line 79 of file joint-motion-subspace.cpp.
◆ test_nv_against_jmodel() [1/2]
template<typename JointModel , typename ConstraintDerived >
| void test_nv_against_jmodel | ( | const JointModelBase< JointModel > & | jmodel, |
| const JointMotionSubspaceBase< ConstraintDerived > & | constraint | ||
| ) |
Definition at line 86 of file joint-motion-subspace.cpp.
◆ test_nv_against_jmodel() [2/2]
template<typename Scalar , int Options, template< typename, int > class JointCollection, typename ConstraintDerived >
| void test_nv_against_jmodel | ( | const JointModelMimicTpl< Scalar, Options, JointCollection > & | jmodel, |
| const JointMotionSubspaceBase< ConstraintDerived > & | constraint | ||
| ) |
Definition at line 98 of file joint-motion-subspace.cpp.