#include <iostream>#include "pinocchio/algorithm/jacobian.hpp"#include "pinocchio/algorithm/frames.hpp"#include "pinocchio/algorithm/kinematics.hpp"#include "pinocchio/algorithm/crba.hpp"#include "pinocchio/parsers/srdf.hpp"#include "pinocchio/algorithm/aba-derivatives.hpp"#include "pinocchio/algorithm/kinematics-derivatives.hpp"#include "pinocchio/algorithm/frames-derivatives.hpp"#include "pinocchio/algorithm/constrained-dynamics.hpp"#include "pinocchio/algorithm/constrained-dynamics-derivatives.hpp"#include "pinocchio/algorithm/joint-configuration.hpp"#include "pinocchio/multibody/sample-models.hpp"#include "pinocchio/spatial/classic-acceleration.hpp"#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>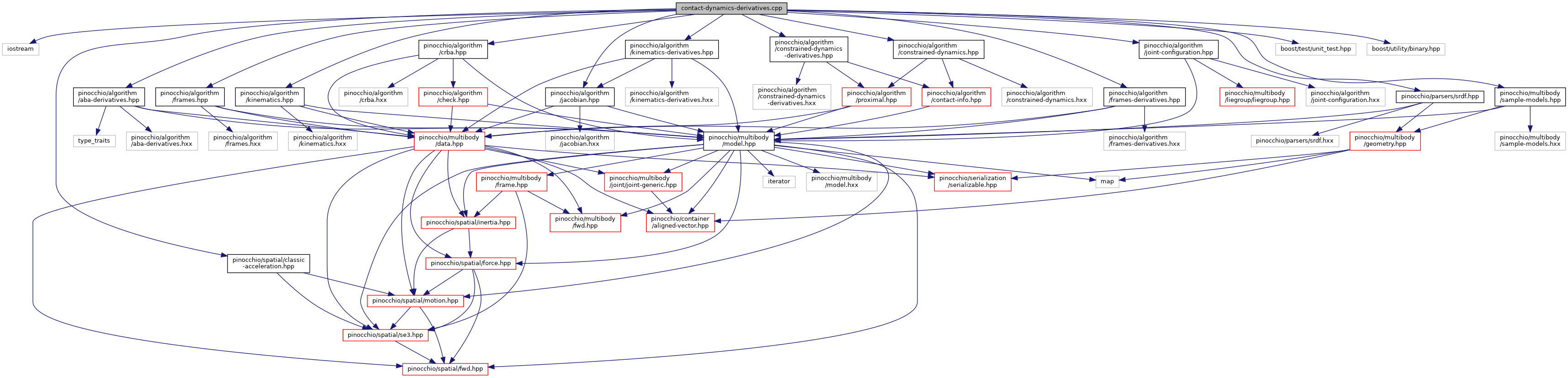
Go to the source code of this file.
Macros | |
| #define | KD 10 |
| #define | KP 10 |
Functions | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_dirty_data) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_3D_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_3D_fd_prox) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_3D_loop_closure_j1j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_3D_loop_closure_j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_6D_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_6D_loop_closure_j1j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_6D_loop_closure_j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_loop_closure_3D_fd_prox) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_WORL_ALIGNED_6D_loop_closure_j1j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_3D_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_3D_loop_closure_j1j2_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_6D_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_loop_closure_kinematics_fd) | |
| BOOST_AUTO_TEST_CASE (test_constraint_dynamics_derivatives_mix_fd) | |
| BOOST_AUTO_TEST_CASE (test_correction_6D) | |
| BOOST_AUTO_TEST_CASE (test_sparse_constraint_dynamics_derivatives) | |
| BOOST_AUTO_TEST_CASE (test_sparse_constraint_dynamics_derivatives_no_contact) | |
| pinocchio::Motion | computeAcceleration (const pinocchio::Model &model, const pinocchio::Data &data, const pinocchio::JointIndex &joint_id, const pinocchio::ReferenceFrame reference_frame, const pinocchio::ContactType contact_type, const pinocchio::SE3 &placement=pinocchio::SE3::Identity()) |
| void | computeVelocityAndAccelerationErrors (const Model &model, const RigidConstraintModel &cmodel, const VectorXd &q, const VectorXd &v, const VectorXd &a, Motion &v_error, Motion &a_error, const VectorXd &Kp, const VectorXd &Kd) |
| createData (const PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(pinocchio::RigidConstraintModel) &constraint_models) | |
| pinocchio::Motion | getContactAcceleration (const Model &model, const Data &data, const RigidConstraintModel &cmodel, const pinocchio::SE3 &c1Mc2=SE3::Identity()) |
Macro Definition Documentation
◆ KD
| #define KD 10 |
Definition at line 31 of file contact-dynamics-derivatives.cpp.
◆ KP
| #define KP 10 |
Definition at line 30 of file contact-dynamics-derivatives.cpp.
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_dirty_data | ) |
Definition at line 2447 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_3D_fd | ) |
Definition at line 611 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [3/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_3D_fd_prox | ) |
Definition at line 730 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [4/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_3D_loop_closure_j1j2_fd | ) |
Definition at line 1629 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [5/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_3D_loop_closure_j2_fd | ) |
Definition at line 990 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [6/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_6D_fd | ) |
Definition at line 291 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [7/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_6D_loop_closure_j1j2_fd | ) |
Definition at line 1323 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [8/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_6D_loop_closure_j2_fd | ) |
Definition at line 1148 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [9/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_loop_closure_3D_fd_prox | ) |
Definition at line 858 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [10/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_WORL_ALIGNED_6D_loop_closure_j1j2_fd | ) |
Definition at line 1500 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [11/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_3D_fd | ) |
Definition at line 2003 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [12/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_3D_loop_closure_j1j2_fd | ) |
Definition at line 1755 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [13/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_LOCAL_WORLD_ALIGNED_6D_fd | ) |
Definition at line 1885 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [14/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_loop_closure_kinematics_fd | ) |
Definition at line 2322 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [15/18]
| BOOST_AUTO_TEST_CASE | ( | test_constraint_dynamics_derivatives_mix_fd | ) |
Definition at line 2120 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [16/18]
| BOOST_AUTO_TEST_CASE | ( | test_correction_6D | ) |
Definition at line 419 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [17/18]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_constraint_dynamics_derivatives | ) |
Definition at line 99 of file contact-dynamics-derivatives.cpp.
◆ BOOST_AUTO_TEST_CASE() [18/18]
| BOOST_AUTO_TEST_CASE | ( | test_sparse_constraint_dynamics_derivatives_no_contact | ) |
Definition at line 38 of file contact-dynamics-derivatives.cpp.
◆ computeAcceleration()
| pinocchio::Motion computeAcceleration | ( | const pinocchio::Model & | model, |
| const pinocchio::Data & | data, | ||
| const pinocchio::JointIndex & | joint_id, | ||
| const pinocchio::ReferenceFrame | reference_frame, | ||
| const pinocchio::ContactType | contact_type, | ||
| const pinocchio::SE3 & | placement = pinocchio::SE3::Identity() |
||
| ) |
Definition at line 221 of file contact-dynamics-derivatives.cpp.
◆ computeVelocityAndAccelerationErrors()
| void computeVelocityAndAccelerationErrors | ( | const Model & | model, |
| const RigidConstraintModel & | cmodel, | ||
| const VectorXd & | q, | ||
| const VectorXd & | v, | ||
| const VectorXd & | a, | ||
| Motion & | v_error, | ||
| Motion & | a_error, | ||
| const VectorXd & | Kp, | ||
| const VectorXd & | Kd | ||
| ) |
Definition at line 1117 of file contact-dynamics-derivatives.cpp.
◆ createData()
| createData | ( | const PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(pinocchio::RigidConstraintModel) & | constraint_models | ) |
Definition at line 408 of file contact-dynamics-derivatives.cpp.
◆ getContactAcceleration()
| pinocchio::Motion getContactAcceleration | ( | const Model & | model, |
| const Data & | data, | ||
| const RigidConstraintModel & | cmodel, | ||
| const pinocchio::SE3 & | c1Mc2 = SE3::Identity() |
||
| ) |
Definition at line 273 of file contact-dynamics-derivatives.cpp.