Unit tests for SmartRangeFactor Class. More...
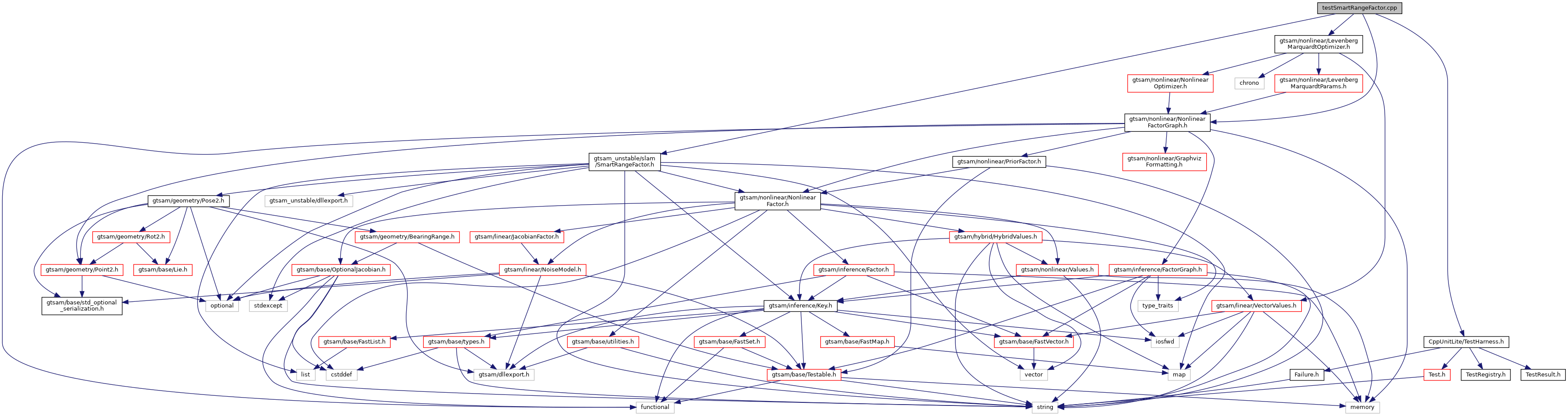
#include <gtsam_unstable/slam/SmartRangeFactor.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <CppUnitLite/TestHarness.h>
Include dependency graph for testSmartRangeFactor.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| static const Point2 | p (0, 10) |
| TEST (SmartRangeFactor, addRange) | |
| TEST (SmartRangeFactor, constructor) | |
| TEST (SmartRangeFactor, optimization) | |
| TEST (SmartRangeFactor, scenario) | |
| TEST (SmartRangeFactor, unwhitenedError) | |
Variables | |
| static const Pose2 | pose1 (0, 0, 0) |
| static const Pose2 | pose2 (5, 0, 0) |
| static const Pose2 | pose3 (5, 5, 0) |
| static const double | r1 = pose1.range(p) |
| static const double | r2 = pose2.range(p) |
| static const double | r3 |
| static const double | sigma = 2.0 |
Detailed Description
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 133 of file testSmartRangeFactor.cpp.
◆ p()
|
static |
◆ TEST() [1/5]
| TEST | ( | SmartRangeFactor | , |
| addRange | |||
| ) |
Definition at line 45 of file testSmartRangeFactor.cpp.
◆ TEST() [2/5]
| TEST | ( | SmartRangeFactor | , |
| constructor | |||
| ) |
Definition at line 37 of file testSmartRangeFactor.cpp.
◆ TEST() [3/5]
| TEST | ( | SmartRangeFactor | , |
| optimization | |||
| ) |
Definition at line 99 of file testSmartRangeFactor.cpp.
◆ TEST() [4/5]
| TEST | ( | SmartRangeFactor | , |
| scenario | |||
| ) |
Definition at line 53 of file testSmartRangeFactor.cpp.
◆ TEST() [5/5]
| TEST | ( | SmartRangeFactor | , |
| unwhitenedError | |||
| ) |
Definition at line 60 of file testSmartRangeFactor.cpp.
Variable Documentation
◆ pose1
|
static |
◆ pose2
| const Pose2 pose2(5, 0, 0) |
◆ pose3
| const Pose2 pose3(5, 5, 0) |
◆ r1
|
static |
Definition at line 32 of file testSmartRangeFactor.cpp.
◆ r2
|
static |
Definition at line 32 of file testSmartRangeFactor.cpp.
◆ r3
|
static |
Initial value:
Definition at line 32 of file testSmartRangeFactor.cpp.
◆ sigma
|
static |
Definition at line 27 of file testSmartRangeFactor.cpp.