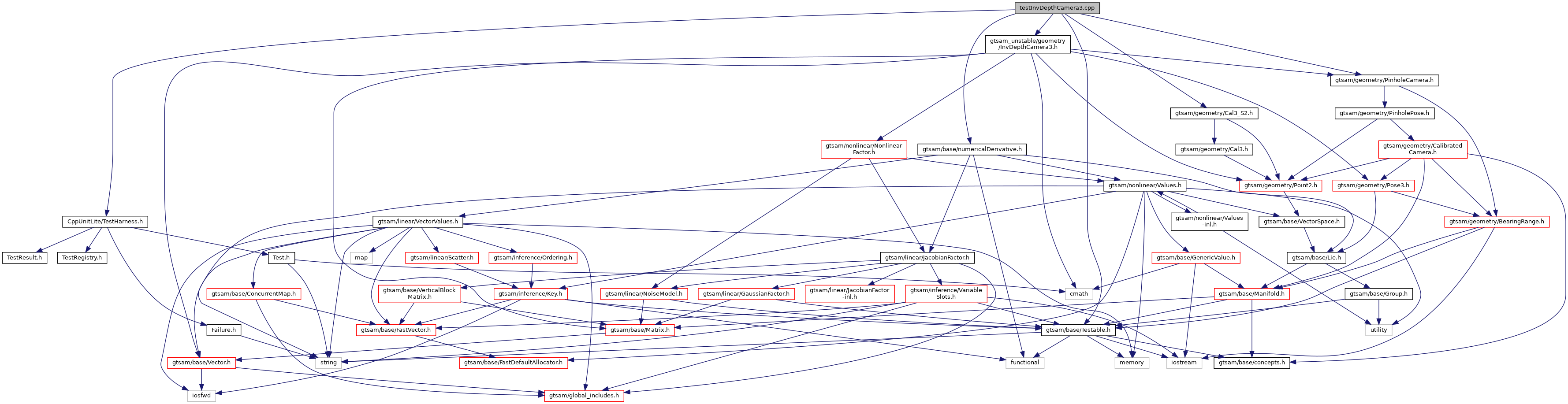
#include <CppUnitLite/TestHarness.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/base/Testable.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam_unstable/geometry/InvDepthCamera3.h>
Include dependency graph for testInvDepthCamera3.cpp:
Go to the source code of this file.
Functions | |
| static Cal3_S2::shared_ptr | K (new Cal3_S2(1500, 1200, 0, 640, 480)) |
| PinholeCamera< Cal3_S2 > | level_camera (level_pose, *K) |
| int | main () |
| Point2 | project_ (const Pose3 &pose, const Vector5 &landmark, const double &inv_depth) |
| TEST (InvDepthFactor, backproject) | |
| TEST (InvDepthFactor, backproject2) | |
| TEST (InvDepthFactor, Dproject_inv_depth) | |
| TEST (InvDepthFactor, Dproject_landmark) | |
| TEST (InvDepthFactor, Dproject_pose) | |
| TEST (InvDepthFactor, Project1) | |
| TEST (InvDepthFactor, Project2) | |
| TEST (InvDepthFactor, Project3) | |
| TEST (InvDepthFactor, Project4) | |
Variables | |
| Pose3 | level_pose = Pose3(Rot3::Ypr(-M_PI/2, 0., -M_PI/2), gtsam::Point3(0,0,1)) |
Function Documentation
◆ K()
|
static |
◆ level_camera()
| PinholeCamera<Cal3_S2> level_camera | ( | level_pose | , |
| * | K | ||
| ) |
◆ main()
| int main | ( | ) |
Definition at line 153 of file testInvDepthCamera3.cpp.
◆ project_()
Definition at line 87 of file testInvDepthCamera3.cpp.
◆ TEST() [1/9]
| TEST | ( | InvDepthFactor | , |
| backproject | |||
| ) |
Definition at line 126 of file testInvDepthCamera3.cpp.
◆ TEST() [2/9]
| TEST | ( | InvDepthFactor | , |
| backproject2 | |||
| ) |
Definition at line 139 of file testInvDepthCamera3.cpp.
◆ TEST() [3/9]
| TEST | ( | InvDepthFactor | , |
| Dproject_inv_depth | |||
| ) |
Definition at line 114 of file testInvDepthCamera3.cpp.
◆ TEST() [4/9]
| TEST | ( | InvDepthFactor | , |
| Dproject_landmark | |||
| ) |
Definition at line 102 of file testInvDepthCamera3.cpp.
◆ TEST() [5/9]
| TEST | ( | InvDepthFactor | , |
| Dproject_pose | |||
| ) |
Definition at line 90 of file testInvDepthCamera3.cpp.
◆ TEST() [6/9]
| TEST | ( | InvDepthFactor | , |
| Project1 | |||
| ) |
Definition at line 25 of file testInvDepthCamera3.cpp.
◆ TEST() [7/9]
| TEST | ( | InvDepthFactor | , |
| Project2 | |||
| ) |
Definition at line 41 of file testInvDepthCamera3.cpp.
◆ TEST() [8/9]
| TEST | ( | InvDepthFactor | , |
| Project3 | |||
| ) |
Definition at line 56 of file testInvDepthCamera3.cpp.
◆ TEST() [9/9]
| TEST | ( | InvDepthFactor | , |
| Project4 | |||
| ) |
Definition at line 71 of file testInvDepthCamera3.cpp.
Variable Documentation
◆ level_pose
| Pose3 level_pose = Pose3(Rot3::Ypr(-M_PI/2, 0., -M_PI/2), gtsam::Point3(0,0,1)) |
Definition at line 21 of file testInvDepthCamera3.cpp.