#include <PreintegratedRotation.h>
Public Member Functions | |
| virtual bool | equals (const PreintegratedRotationParams &other, double tol=1e-9) const |
| std::optional< Pose3 > | getBodyPSensor () const |
| const Matrix3 & | getGyroscopeCovariance () const |
| std::optional< Vector3 > | getOmegaCoriolis () const |
| PreintegratedRotationParams () | |
| PreintegratedRotationParams (const Matrix3 &gyroscope_covariance, std::optional< Vector3 > omega_coriolis) | |
| virtual void | print (const std::string &s) const |
| void | setBodyPSensor (const Pose3 &pose) |
| void | setGyroscopeCovariance (const Matrix3 &cov) |
| void | setOmegaCoriolis (const Vector3 &omega) |
| virtual | ~PreintegratedRotationParams () |
Public Attributes | |
| std::optional< Pose3 > | body_P_sensor |
| The pose of the sensor in the body frame. More... | |
| Matrix3 | gyroscopeCovariance |
| std::optional< Vector3 > | omegaCoriolis |
| Coriolis constant. More... | |
Detailed Description
Parameters for pre-integration: Usage: Create just a single Params and pass a shared pointer to the constructor
Definition at line 57 of file PreintegratedRotation.h.
Constructor & Destructor Documentation
◆ PreintegratedRotationParams() [1/2]
|
inline |
Definition at line 64 of file PreintegratedRotation.h.
◆ PreintegratedRotationParams() [2/2]
|
inline |
Definition at line 66 of file PreintegratedRotation.h.
◆ ~PreintegratedRotationParams()
|
inlinevirtual |
Definition at line 74 of file PreintegratedRotation.h.
Member Function Documentation
◆ equals()
|
virtual |
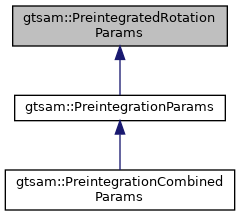
Reimplemented in gtsam::PreintegrationCombinedParams, and gtsam::PreintegrationParams.
Definition at line 36 of file PreintegratedRotation.cpp.
◆ getBodyPSensor()
|
inline |
Definition at line 85 of file PreintegratedRotation.h.
◆ getGyroscopeCovariance()
|
inline |
Definition at line 83 of file PreintegratedRotation.h.
◆ getOmegaCoriolis()
|
inline |
Definition at line 84 of file PreintegratedRotation.h.
◆ print()
|
virtual |
Reimplemented in gtsam::PreintegrationCombinedParams, and gtsam::PreintegrationParams.
Definition at line 28 of file PreintegratedRotation.cpp.
◆ setBodyPSensor()
|
inline |
Definition at line 81 of file PreintegratedRotation.h.
◆ setGyroscopeCovariance()
|
inline |
Definition at line 79 of file PreintegratedRotation.h.
◆ setOmegaCoriolis()
|
inline |
Definition at line 80 of file PreintegratedRotation.h.
Member Data Documentation
◆ body_P_sensor
| std::optional<Pose3> gtsam::PreintegratedRotationParams::body_P_sensor |
The pose of the sensor in the body frame.
Definition at line 62 of file PreintegratedRotation.h.
◆ gyroscopeCovariance
| Matrix3 gtsam::PreintegratedRotationParams::gyroscopeCovariance |
Continuous-time "Covariance" of gyroscope measurements The units for stddev are σ = rad/s/√Hz
Definition at line 60 of file PreintegratedRotation.h.
◆ omegaCoriolis
| std::optional<Vector3> gtsam::PreintegratedRotationParams::omegaCoriolis |
Coriolis constant.
Definition at line 61 of file PreintegratedRotation.h.
The documentation for this struct was generated from the following files: