#include <TransferFactor.h>
Public Types | |
| using | Base = NoiseModelFactorN< F, F > |
| using | Triplet = std::tuple< Point2, Point2, Point2 > |
 Public Types inherited from gtsam::NoiseModelFactorN< F, F > Public Types inherited from gtsam::NoiseModelFactorN< F, F > | |
| using | ValueType = typename std::tuple_element< I - 1, std::tuple< ValueTypes... > >::type |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
| Vector | evaluateError (const F &F1, const F &F2, OptionalMatrixType H1=nullptr, OptionalMatrixType H2=nullptr) const override |
| Vector of errors returns 2*N vector. More... | |
| TransferFactor (EdgeKey edge1, EdgeKey edge2, const std::vector< Triplet > &triplets, const SharedNoiseModel &model=nullptr) | |
| Constructor that accepts a vector of point triplets. More... | |
| Public Member Functions inherited from gtsam::NoiseModelFactorN< F, F > | |
| Key | key () const |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const =0 |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| ~NoiseModelFactorN () override | |
| NoiseModelFactorN () | |
| Default Constructor for I/O. More... | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) | |
| Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrixTypeT< ValueTypes >... H) const=0 |
| Vector | evaluateError (const ValueTypes &... x, MatrixTypeT< ValueTypes > &... H) const |
| Vector | evaluateError (const ValueTypes &... x) const |
| AreAllMatrixRefs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| AreAllMatrixPtrs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| Key | key1 () const |
| Key | key2 () const |
| Key | key3 () const |
| Key | key4 () const |
| Key | key5 () const |
| Key | key6 () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| double | error (const HybridValues &c) const override |
| virtual double | error (const Values &c) const |
| double | error (const Values &c) const override |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| virtual bool | active (const Values &c) const |
| virtual shared_ptr | clone () const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
| Public Member Functions inherited from gtsam::TransferEdges< F > | |
| std::pair< Matrix3, Matrix3 > | getMatrices (const F &F1, const F &F2) const |
| Create Matrix3 objects based on EdgeKey configurations. More... | |
| TransferEdges (EdgeKey edge1, EdgeKey edge2) | |
Protected Attributes | |
| std::vector< Triplet > | triplets_ |
| Point triplets. More... | |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
| Protected Attributes inherited from gtsam::TransferEdges< F > | |
| uint32_t | c_ |
| The transfer target. More... | |
| EdgeKey | edge1_ |
| EdgeKey | edge2_ |
| The two EdgeKeys. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from gtsam::TransferEdges< F > | |
| static size_t | ViewA (const EdgeKey &edge1, const EdgeKey &edge2) |
| Returns the view A index based on the EdgeKeys. More... | |
| static size_t | ViewB (const EdgeKey &edge1, const EdgeKey &edge2) |
| Returns the view B index based on the EdgeKeys. More... | |
| static size_t | ViewC (const EdgeKey &edge1, const EdgeKey &edge2) |
| Returns the view C index based on the EdgeKeys. More... | |
| Static Public Attributes inherited from gtsam::NoiseModelFactorN< F, F > | |
| constexpr static auto | N |
| N is the number of variables (N-way factor) More... | |
| Protected Types inherited from gtsam::NoiseModelFactorN< F, F > | |
| using | Base = NoiseModelFactor |
| using | KeyType = Key |
| using | MatrixTypeT = Matrix |
| using | OptionalMatrixTypeT = Matrix * |
| using | This = NoiseModelFactorN< ValueTypes... > |
| using | IsConvertible = typename std::enable_if< std::is_convertible< From, To >::value, void >::type |
| using | IndexIsValid = typename std::enable_if<(I >=1) &&(I<=N), void >::type |
| using | ContainerElementType = typename std::decay< decltype(*std::declval< Container >().begin())>::type |
| using | IsContainerOfKeys = IsConvertible< ContainerElementType< Container >, Key > |
| using | AreAllMatrixRefs = std::enable_if_t<(... &&std::is_convertible< Args, Matrix & >::value), Ret > |
| using | IsMatrixPointer = std::is_same< typename std::decay_t< Arg >, Matrix * > |
| using | IsNullpointer = std::is_same< typename std::decay_t< Arg >, std::nullptr_t > |
| using | AreAllMatrixPtrs = std::enable_if_t<(... &&(IsMatrixPointer< Args >::value||IsNullpointer< Args >::value)), Ret > |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
Detailed Description
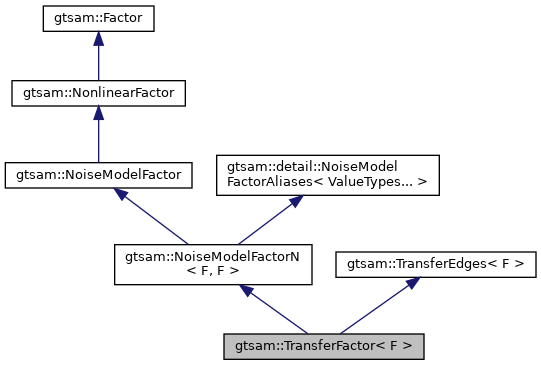
template<typename F>
class gtsam::TransferFactor< F >
Binary factor in the context of Structure from Motion (SfM). It is used to transfer transfer corresponding points from two views to a third based on two fundamental matrices. The factor computes the error between the transferred points pa and pb, and the actual point pc in the target view. Jacobians are done using numerical differentiation.
Definition at line 87 of file TransferFactor.h.
Member Typedef Documentation
◆ Base
| using gtsam::TransferFactor< F >::Base = NoiseModelFactorN<F, F> |
Definition at line 89 of file TransferFactor.h.
◆ Triplet
| using gtsam::TransferFactor< F >::Triplet = std::tuple<Point2, Point2, Point2> |
Definition at line 90 of file TransferFactor.h.
Constructor & Destructor Documentation
◆ TransferFactor()
|
inline |
Constructor that accepts a vector of point triplets.
- Parameters
-
edge1 First EdgeKey specifying F1: (a, c) or (c, a). edge2 Second EdgeKey specifying F2: (b, c) or (c, b). triplets A vector of triplets containing (pa, pb, pc). model An optional SharedNoiseModel that defines the noise model for this factor. Defaults to nullptr.
Definition at line 105 of file TransferFactor.h.
Member Function Documentation
◆ evaluateError()
|
inlineoverride |
Vector of errors returns 2*N vector.
Definition at line 113 of file TransferFactor.h.
Member Data Documentation
◆ triplets_
|
protected |
Point triplets.
Definition at line 93 of file TransferFactor.h.
The documentation for this class was generated from the following file: