Simple linear Kalman filter implemented using factor graphs, i.e., performs Cholesky or QR-based SRIF (Square-Root Information Filter). More...
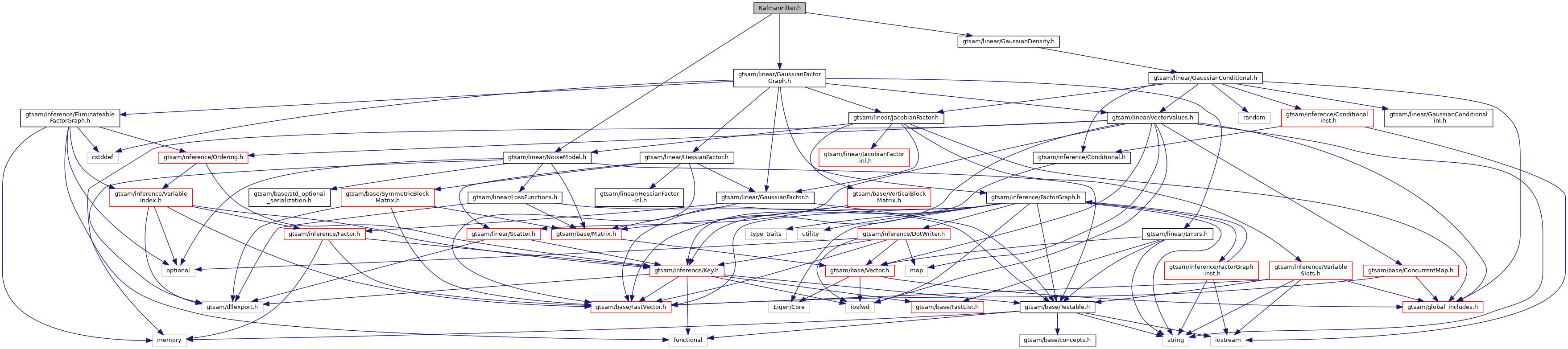
#include <gtsam/linear/GaussianDensity.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/NoiseModel.h>
Include dependency graph for KalmanFilter.h:
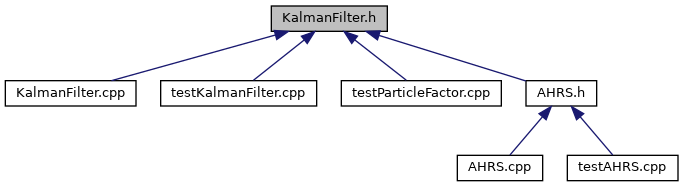
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::KalmanFilter |
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | KALMANFILTER_DEFAULT_FACTORIZATION QR |
Detailed Description
Simple linear Kalman filter implemented using factor graphs, i.e., performs Cholesky or QR-based SRIF (Square-Root Information Filter).
- Date
- Sep 3, 2011
Definition in file KalmanFilter.h.
Macro Definition Documentation
◆ KALMANFILTER_DEFAULT_FACTORIZATION
| #define KALMANFILTER_DEFAULT_FACTORIZATION QR |
Definition at line 27 of file KalmanFilter.h.