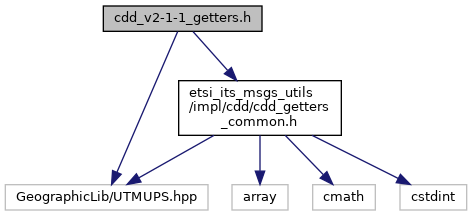
Getter functions for the ETSI ITS Common Data Dictionary (CDD) v2.1.1. More...
Go to the source code of this file.
Functions | |
| double | getLateralAcceleration (const AccelerationComponent &lateral_acceleration) |
| Get the lateral acceleration. More... | |
| double | getLateralAccelerationConfidence (const AccelerationComponent &lateral_acceleration) |
| Get the Lateral Acceleration Confidence. More... | |
| double | getLongitudinalAcceleration (const AccelerationComponent &longitudinal_acceleration) |
| Get the longitudinal acceleration. More... | |
| double | getLongitudinalAccelerationConfidence (const AccelerationComponent &longitudinal_acceleration) |
| Get the Longitudinal Acceleration Confidence. More... | |
| template<typename PositionConfidenceEllipse > | |
| std::array< double, 4 > | getPositionConfidenceEllipse (const PositionConfidenceEllipse &position_confidence_ellipse, const double object_heading) |
| Get the covariance matrix of the position confidence ellipse. More... | |
| template<typename PositionConfidenceEllipse > | |
| std::tuple< double, double, double > | getPositionConfidenceEllipse (PositionConfidenceEllipse &position_confidence_ellipse) |
| Extract major axis length, minor axis length and orientation from the given position confidence ellipse. More... | |
| template<typename PositionConfidenceEllipse > | |
| std::array< double, 4 > | getWGSPositionConfidenceEllipse (const PositionConfidenceEllipse &position_confidence_ellipse) |
| Get the covariance matrix of the position confidence ellipse. More... | |
Detailed Description
Getter functions for the ETSI ITS Common Data Dictionary (CDD) v2.1.1.
Definition in file cdd_v2-1-1_getters.h.
Function Documentation
◆ getLateralAcceleration()
|
inline |
Get the lateral acceleration.
- Parameters
-
lateralAcceleration to get the lateral acceleration from
- Returns
- lateral acceleration in m/s^2 as decimal number (left is positive)
Definition at line 65 of file cdd_v2-1-1_getters.h.
◆ getLateralAccelerationConfidence()
|
inline |
Get the Lateral Acceleration Confidence.
- Parameters
-
lateral_acceleration to get the LateralAccelerationConfidence from
- Returns
- double standard deviation of the lateral acceleration in m/s^2 as decimal number
Definition at line 75 of file cdd_v2-1-1_getters.h.
◆ getLongitudinalAcceleration()
|
inline |
Get the longitudinal acceleration.
- Parameters
-
longitudinalAcceleration to get the longitudinal acceleration from
- Returns
- longitudinal acceleration in m/s^2 as decimal number (left is positive)
Definition at line 45 of file cdd_v2-1-1_getters.h.
◆ getLongitudinalAccelerationConfidence()
|
inline |
Get the Longitudinal Acceleration Confidence.
- Parameters
-
longitudinal_acceleration to get the LongitudinalAccelerationConfidence from
- Returns
- double standard deviation of the longitudinal acceleration in m/s^2 as decimal number
Definition at line 55 of file cdd_v2-1-1_getters.h.
◆ getPositionConfidenceEllipse() [1/2]
|
inline |
Get the covariance matrix of the position confidence ellipse.
- Parameters
-
position_confidence_ellipse The position confidence ellipse to get the covariance matrix from object_heading The object heading in radians
- Returns
- std::array<double, 4> The covariance matrix of the position confidence ellipse in vehicle coordinates (x = longitudinal, y = lateral)
Definition at line 103 of file cdd_v2-1-1_getters.h.
◆ getPositionConfidenceEllipse() [2/2]
|
inline |
Extract major axis length, minor axis length and orientation from the given position confidence ellipse.
- Parameters
-
position_confidence_ellipse The position confidence ellipse to extract the values from
- Returns
- std::tuple<double, double, double> major axis length in meters, minor axis length in meters, and orientation in degrees
Definition at line 87 of file cdd_v2-1-1_getters.h.
◆ getWGSPositionConfidenceEllipse()
|
inline |
Get the covariance matrix of the position confidence ellipse.
- Parameters
-
position_confidence_ellipse The position confidence ellipse to get the covariance matrix from object_heading The object heading in radians
- Returns
- std::array<double, 4> The covariance matrix of the position confidence ellipse in WGS coordinates (x = North, y = East)
Definition at line 116 of file cdd_v2-1-1_getters.h.